
TRPO
제안한 surrogate objective function이 non-trival 한 step size로 policy improvement 를 보장함을 증명.
참조
Pseudo-code
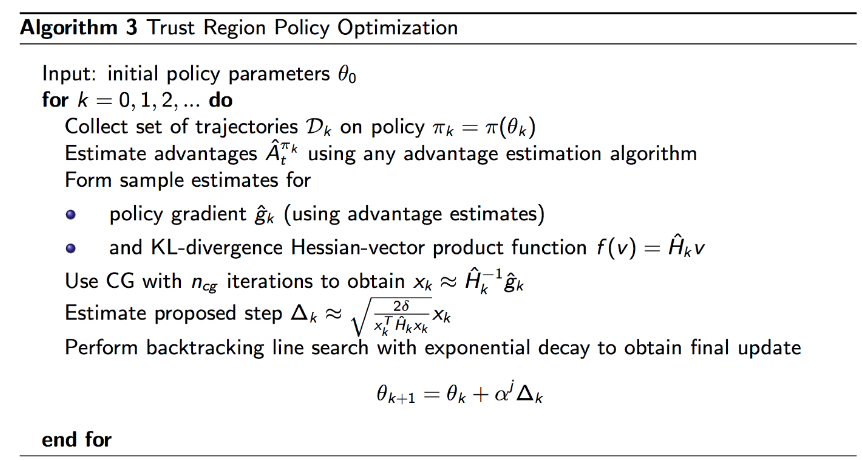
step 1: get returns and GAEs
step 2: train critic several steps with respect to returns
step 3: get gradient of loss and hessian of kl
step 4: get step direction and step size and full step
step 5: do backtracking line search for n times
optimization problem
\(\begin{align} \max_\theta\quad &E_{s\sim\rho_{\theta_\mathrm{old} },a\sim q}\left[\frac{\pi_\theta(a\vert s)}{q(a\vert s)}Q_{\theta_\mathrm{old} }(s,a)\right] \\ \mathrm{s.t.\ }&E_{s\sim\rho_{\theta_\mathrm{old} }}\left[D_\mathrm{KL}\left(\pi_{\theta_\mathrm{old} }(\cdot\vert s) \parallel \pi_\theta(\cdot\vert s)\right)\right] \leq \delta \end{align}\)
step 1 : get GAE
gae참조
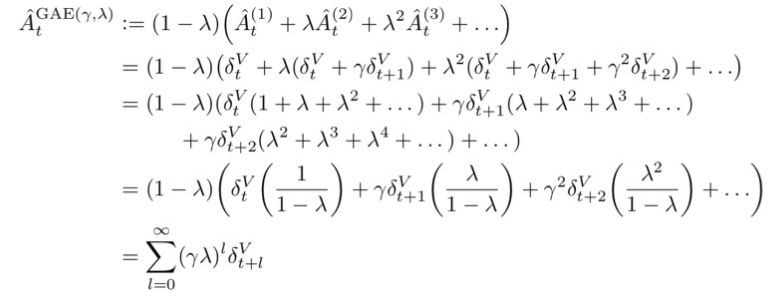
GAE는 td-error의 discounted summation
1
2
3
4
5
6
7
8
9
10
11
def train_model(actor, critic, memory, actor_optim, critic_optim):
memory = np.array(memory)
states = np.vstack(memory[:, 0])
actions = list(memory[:, 1])
rewards = list(memory[:, 2])
masks = list(memory[:, 3])
values = critic(torch.Tensor(states))
# ----------------------------
# step 1: get returns and GAEs
returns, advants = get_gae(rewards, masks, values)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
def get_gae(rewards, masks, values):
rewards = torch.Tensor(rewards)
masks = torch.Tensor(masks)
returns = torch.zeros_like(rewards)
advants = torch.zeros_like(rewards)
running_returns = 0
previous_value = 0
running_advants = 0
for t in reversed(range(0, len(rewards))):
running_returns = rewards[t] + hp.gamma * running_returns * masks[t]
running_tderror = rewards[t] + hp.gamma * previous_value * masks[t] - \
values.data[t]
running_advants = running_tderror + hp.gamma * hp.lamda * \
running_advants * masks[t]
returns[t] = running_returns
previous_value = values.data[t]
advants[t] = running_advants
advants = (advants - advants.mean()) / advants.std()
return returns, advants
step2 : train critic
Q의 MSE loss 를 구함
1
2
3
4
5
def train_model(actor, critic, memory, actor_optim, critic_optim):
...
# ----------------------------
# step 2: train critic several steps with respect to returns
train_critic(critic, states, returns, advants, critic_optim)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
def train_critic(critic, states, returns, advants, critic_optim):
criterion = torch.nn.MSELoss()
n = len(states)
arr = np.arange(n)
for epoch in range(5):
np.random.shuffle(arr)
for i in range(n // hp.batch_size):
batch_index = arr[hp.batch_size * i: hp.batch_size * (i + 1)]
batch_index = torch.LongTensor(batch_index)
inputs = torch.Tensor(states)[batch_index]
target1 = returns.unsqueeze(1)[batch_index]
target2 = advants.unsqueeze(1)[batch_index]
values = critic(inputs)
loss = criterion(values, target1 + target2)
critic_optim.zero_grad()
loss.backward()
critic_optim.step()
step 3: get gradient of loss and hessian of kl
1
2
3
4
5
6
7
8
9
10
11
12
def train_model(actor, critic, memory, actor_optim, critic_optim):
...
# ----------------------------
# step 3: get gradient of loss and hessian of kl
mu, std, logstd = actor(torch.Tensor(states))
old_policy = log_density(torch.Tensor(actions), mu, std, logstd)
loss = surrogate_loss(actor, advants, states, old_policy.detach(), actions)
loss_grad = torch.autograd.grad(loss, actor.parameters())
loss_grad = flat_grad(loss_grad)
step_dir = conjugate_gradient(actor, states, loss_grad.data, nsteps=10)
gradient of loss
\(\begin{equation} \begin{split} g &= \nabla_{\theta} L_{\theta_{old}(\theta)} |_{\theta_{old}} \\ &= \nabla_{\theta} E_{s\sim\rho_{\theta_\mathrm{old} },a\sim q}\left[\frac{\pi_\theta(a\vert s)}{q(a\vert s)}Q_{\theta_\mathrm{old} }(s,a)\right] \end{split} \end{equation}\)
1
2
3
4
5
6
7
8
def surrogate_loss(actor, advants, states, old_policy, actions):
mu, std, logstd = actor(torch.Tensor(states))
new_policy = log_density(torch.Tensor(actions), mu, std, logstd)
advants = advants.unsqueeze(1)
surrogate = advants * torch.exp(new_policy - old_policy)
surrogate = surrogate.mean()
return surrogate
changed constraint problem
\(\underset{\theta}{maximize}\; g^{T}s \;\; \mathrm{s.t. }\;\; \frac{1}{2}s^{T}Hs \leq \delta \;\;\mathrm{, where }\;\; s = \theta - \theta_{old}\)
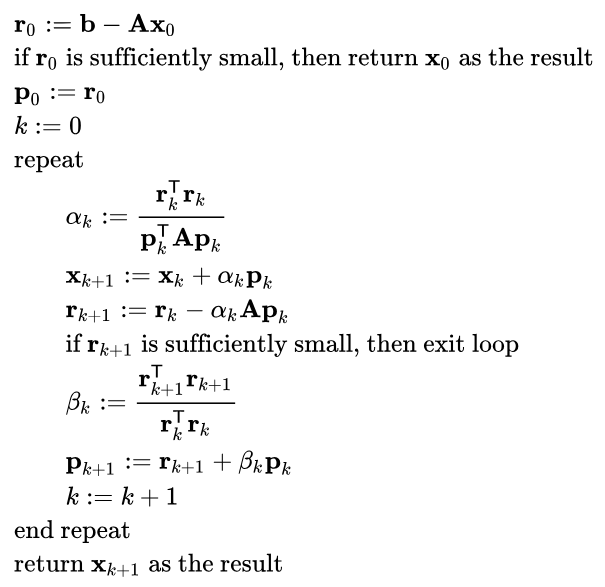
Conjugate gradient method
update 방향 $s = H^{-1}g$ 를 효과적으로 찾는 방법
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
def conjugate_gradient(actor, states, b, nsteps, residual_tol=1e-10):
x = torch.zeros(b.size())
r = b.clone()
p = b.clone()
rdotr = torch.dot(r, r)
for i in range(nsteps):
_Avp = fisher_vector_product(actor, states, p)
alpha = rdotr / torch.dot(p, _Avp)
x += alpha * p
r -= alpha * _Avp
new_rdotr = torch.dot(r, r)
betta = new_rdotr / rdotr
p = r + betta * p
rdotr = new_rdotr
if rdotr < residual_tol:
break
return x
kl-divergence를 현재 policy에 대해서 구한 다음에 actor parameter에 대해서 미분.
이렇게 미분한 gradient를 일단 flat하게 핀 다음에 p라는 벡터와 곱해서 하나의 값으로 만듬
1
2
3
4
5
6
7
8
9
10
11
12
def fisher_vector_product(actor, states, p):
p.detach()
kl = kl_divergence(new_actor=actor, old_actor=actor, states=states)
kl = kl.mean()
kl_grad = torch.autograd.grad(kl, actor.parameters(), create_graph=True)
kl_grad = flat_grad(kl_grad) # check kl_grad == 0
kl_grad_p = (kl_grad * p).sum()
kl_hessian_p = torch.autograd.grad(kl_grad_p, actor.parameters())
kl_hessian_p = flat_hessian(kl_hessian_p)
return kl_hessian_p + 0.1 * p
step 4: get step size and full step
solution of changed optimization
\(\theta_{k+1} = \theta_{k} + \sqrt{\frac{2\delta}{s^{T}Hs}}s\)
1
2
3
4
5
6
7
8
9
10
def train_model(actor, critic, memory, actor_optim, critic_optim):
...
# ----------------------------
# step 4: get step direction and step size and full step
params = flat_params(actor)
shs = 0.5 * (step_dir * fisher_vector_product(actor, states, step_dir)
).sum(0, keepdim=True)
step_size = 1 / torch.sqrt(shs / hp.max_kl)[0]
full_step = step_size * step_dir
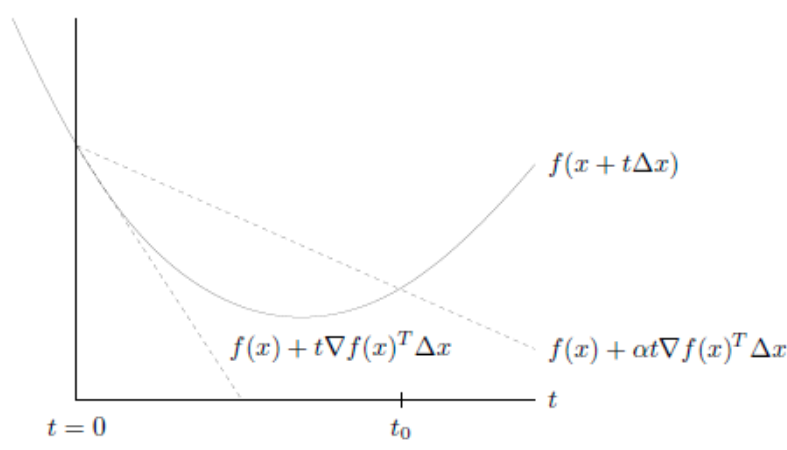
step 5: backtracking line search
![]()
| 실제 개선값 $f(x-t\nabla f(x))$ > 개선의 기대값 $f(x) - \alpha | \nabla f(x) | _{2}^{2}$ |
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
def train_model(actor, critic, memory, actor_optim, critic_optim):
...
# ----------------------------
# step 5: do backtracking line search for n times
old_actor = Actor(actor.num_inputs, actor.num_outputs)
update_model(old_actor, params)
expected_improve = (loss_grad * full_step).sum(0, keepdim=True)
flag = False
fraction = 1.0
for i in range(10):
new_params = params + fraction * full_step
update_model(actor, new_params)
new_loss = surrogate_loss(actor, advants, states, old_policy.detach(),
actions)
loss_improve = new_loss - loss
expected_improve *= fraction
kl = kl_divergence(new_actor=actor, old_actor=old_actor, states=states)
kl = kl.mean()
print('kl: {:.4f} loss improve: {:.4f} expected improve: {:.4f} '
'number of line search: {}'
.format(kl.data.numpy(), loss_improve, expected_improve[0], i))
# see https: // en.wikipedia.org / wiki / Backtracking_line_search
if kl < hp.max_kl and (loss_improve / expected_improve) > 0.5:
flag = True
break
fraction *= 0.5
if not flag:
params = flat_params(old_actor)
update_model(actor, params)
print('policy update does not impove the surrogate')

Leave a comment