
PyBullet 사용법에 대해서 알아보자.
PyBullet에 대해서 간단히 소개하자면,
다양한 환경에서 여러가지 플랫폼의 로봇을 시뮬레이션 해볼 수 있는 open source용 물리 엔진이다.
API가 잘 되있어서 응용이 편리하고, 용도에 맞게 설정할 수 있어 자유도가 높다.
gym과의 interface도 잘 구성되어 있기 때문에 custom 강화학습용 환경을 만드는데도 매우 훌륭하다.
1. Server-Client Connection
1
import pybullet as p
1
2
pybullet build time: May 20 2022 19:45:31
1
2
# p.connect(p.GUI)
p.connect(p.DIRECT)
1
0
client와 server가 연결하는 방법은 일반적인 방법은 2가지가 있다.
추가적인 방법은 Qickstart Guid를 보면 잘 설명되어 있다.
p.DIRECT를 인자로 넘기면 rendering 없이 빠른 처리를 얻을 수 있다.
p.GUI를 넘기면 말 그대로 GUI rendering을 제공하여 시각화된 결과를 얻을 수 있다.
문제없이 연결이 완료되면 default client id 인 0을 반환한다.
2. How to Load Bodies
환경과 로봇에 대한 모델을 불러와야 하기 때문에 다음과 같은 함수를 호출하여 관련된 path를 불러온다.
Bullet Data files 이곳에 담긴 데이터들을 불러올 수 있다.
1
2
3
import pybullet_data
p.setAdditionalSearchPath(pybullet_data.getDataPath())
robot이나 ground model은 body라고 불리면서 시뮬레이션에 불러올 수 있고
urdf format으로 되어 있다.
어떤 위치에 어느 클라이언트에 셋팅할 지를 정할 수 있고
현 client와 연결된 시뮬레이션 환경에 몇개의 body가 연결되어 있는지도 알 수 있다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
# First, let's make sure we start with a fresh new simulation.
# Otherwise, we can keep adding objects by running this cell over again.
p.resetSimulation()
# Load our simulation floor plane at the origin (0, 0, 0).
terrain = p.loadURDF('plane.urdf')
# Load an R2D2 droid at the position at 0.5 meters height in the z-axis.
r2d2 = p.loadURDF('r2d2.urdf', [0, 0, 0.5])
# We can check the number of bodies we have in the simulation.
p.getNumBodies()
1
2
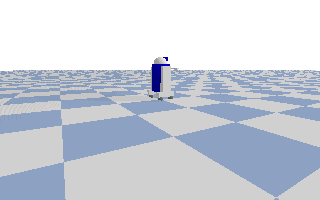
3. How to Get Input Data
jupyter notebook에 rendering 결과를 보여주기 위한 함수이다.
rgba, depth, semantic Mask에 대한 결과를 다음과 같이 camera를 세팅하여 얻어 올 수 있다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
import numpy as np
from PIL import Image
from IPython.display import display
def show_render(p):
width = 320
height = 200
img_arr = p.getCameraImage(
width,
height,
viewMatrix=p.computeViewMatrixFromYawPitchRoll(
cameraTargetPosition=[0, 0, 0],
distance=4,
yaw=60,
pitch=-10,
roll=0,
upAxisIndex=2,
),
projectionMatrix=p.computeProjectionMatrixFOV(
fov=60,
aspect=width/height,
nearVal=0.01,
farVal=100,
),
shadow=True,
lightDirection=[1, 1, 1],
)
width, height, rgba, depth, mask = img_arr
print(f"width : {width}, height: {height}")
print(f"rgba shape={rgba.shape}, dtype={rgba.dtype}")
display(Image.fromarray(rgba, 'RGBA'))
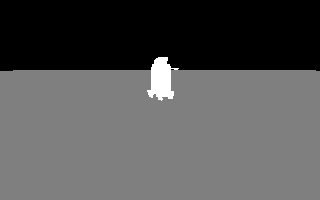
print(f"depth shape={depth.shape}, dtype={depth.dtype}, as values from 0.0 (near) to 1.0 (far)")
display(Image.fromarray((depth*255).astype('uint8')))
print(f"mask shape={mask.shape}, dtype={mask.dtype}, as unique values from 0 to N-1 entities, and -1 as None")
display(Image.fromarray(np.interp(mask, (-1, mask.max()), (0, 255)).astype('uint8')))
show_render(p)
1
2
3
width : 320, height: 200
rgba shape=(200, 320, 4), dtype=uint8
1
2
depth shape=(200, 320), dtype=float32, as values from 0.0 (near) to 1.0 (far)

1
2
mask shape=(200, 320), dtype=int32, as unique values from 0 to N-1 entities, and -1 as None
4. How to get Robot Information
r2d2로봇을 구동하기 위해서 필요한 joint들의 정보를 다음과 같이 얻어올 수 있다.
dataclass 는 모든 인자에 대한 메서드를 초기화하고 출력할 수 있도록
init 과 repr 가 정의되어 있는 decorator 이다. 그것을 활용해보자.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
# First let's define a class for the JointInfo.
from dataclasses import dataclass
@dataclass
class Joint:
index: int
name: str
type: int
gIndex: int
uIndex: int
flags: int
damping: float
friction: float
lowerLimit: float
upperLimit: float
maxForce: float
maxVelocity: float
linkName: str
axis: tuple
parentFramePosition: tuple
parentFrameOrientation: tuple
parentIndex: int
def __post_init__(self):
self.name = str(self.name, 'utf-8')
self.linkName = str(self.linkName, 'utf-8')
# Let's analyze the R2D2 droid!
print(f"r2d2 unique ID: {r2d2}")
for i in range(p.getNumJoints(r2d2)):
joint = Joint(*p.getJointInfo(r2d2, i))
print('\t', joint)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
r2d2 unique ID: 1
Joint(index=0, name='base_to_right_leg', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='right_leg', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.22, 0.0, 0.25), parentFrameOrientation=(0.0, -0.7070904020014416, 0.0, 0.7071231599922604), parentIndex=-1)
Joint(index=1, name='right_base_joint', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='right_base', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.2999999996780742, 0.0, -1.3898038463944216e-05), parentFrameOrientation=(0.0, 0.7070904020014416, 0.0, 0.7071231599922604), parentIndex=0)
Joint(index=2, name='right_front_wheel_joint', type=0, gIndex=7, uIndex=6, flags=1, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=100.0, maxVelocity=100.0, linkName='right_front_wheel', axis=(0.0, 0.0, 1.0), parentFramePosition=(0.0, 0.133333333333, -0.085), parentFrameOrientation=(0.0, -0.7070904020014416, 0.0, 0.7071231599922604), parentIndex=1)
Joint(index=3, name='right_back_wheel_joint', type=0, gIndex=8, uIndex=7, flags=1, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=100.0, maxVelocity=100.0, linkName='right_back_wheel', axis=(0.0, 0.0, 1.0), parentFramePosition=(0.0, -0.133333333333, -0.085), parentFrameOrientation=(0.0, -0.7070904020014416, 0.0, 0.7071231599922604), parentIndex=1)
Joint(index=4, name='base_to_left_leg', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='left_leg', axis=(0.0, 0.0, 0.0), parentFramePosition=(-0.22, 0.0, 0.25), parentFrameOrientation=(0.0, -0.7070904020014416, 0.0, 0.7071231599922604), parentIndex=-1)
Joint(index=5, name='left_base_joint', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='left_base', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.2999999996780742, 0.0, -1.3898038463944216e-05), parentFrameOrientation=(0.0, 0.7070904020014416, 0.0, 0.7071231599922604), parentIndex=4)
Joint(index=6, name='left_front_wheel_joint', type=0, gIndex=9, uIndex=8, flags=1, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=100.0, maxVelocity=100.0, linkName='left_front_wheel', axis=(0.0, 0.0, 1.0), parentFramePosition=(0.0, 0.133333333333, -0.085), parentFrameOrientation=(0.0, -0.7070904020014416, 0.0, 0.7071231599922604), parentIndex=5)
Joint(index=7, name='left_back_wheel_joint', type=0, gIndex=10, uIndex=9, flags=1, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=100.0, maxVelocity=100.0, linkName='left_back_wheel', axis=(0.0, 0.0, 1.0), parentFramePosition=(0.0, -0.133333333333, -0.085), parentFrameOrientation=(0.0, -0.7070904020014416, 0.0, 0.7071231599922604), parentIndex=5)
Joint(index=8, name='gripper_extension', type=1, gIndex=11, uIndex=10, flags=1, damping=0.0, friction=0.0, lowerLimit=-0.38, upperLimit=0.0, maxForce=1000.0, maxVelocity=0.5, linkName='gripper_pole', axis=(1.0, 0.0, 0.0), parentFramePosition=(0.0, 0.19, 0.2), parentFrameOrientation=(0.0, 0.0, -0.7070904020014416, 0.7071231599922604), parentIndex=-1)
Joint(index=9, name='left_gripper_joint', type=0, gIndex=12, uIndex=11, flags=1, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=0.548, maxForce=1000.0, maxVelocity=0.5, linkName='left_gripper', axis=(0.0, 0.0, 1.0), parentFramePosition=(0.2, 0.02, 0.0), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=8)
Joint(index=10, name='left_tip_joint', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='left_tip', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.0, 0.0, 0.0), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=9)
Joint(index=11, name='right_gripper_joint', type=0, gIndex=13, uIndex=12, flags=1, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=0.548, maxForce=1000.0, maxVelocity=0.5, linkName='right_gripper', axis=(0.0, 0.0, -1.0), parentFramePosition=(0.2, -0.02, 0.0), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=8)
Joint(index=12, name='right_tip_joint', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='right_tip', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.0, 0.0, 0.0), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=11)
Joint(index=13, name='head_swivel', type=0, gIndex=14, uIndex=13, flags=1, damping=0.0, friction=0.0, lowerLimit=-0.38, upperLimit=0.0, maxForce=1000.0, maxVelocity=0.5, linkName='head', axis=(0.0, 0.0, 1.0), parentFramePosition=(0.0, 0.0, 0.3), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=-1)
Joint(index=14, name='tobox', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='box', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.0, 0.1214, 0.1214), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=13)
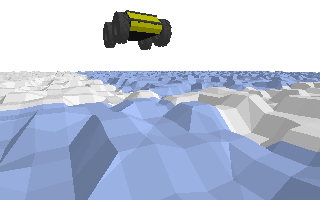
5. How to Set Customized Terrain
ground도 customize해서 설정할 수 있고
로봇의 모델을 바꿀 수도 있다.
Uneven Terrain을 갖는 height feild와
UGV에 해당되는 husky모델을 불러와 보자.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
import random
def set_height_field(p):
random.seed(10)
heightPerturbationRange = 0.5 # 0.05
numHeightfieldRows = 256
numHeightfieldColumns = 256
heightfieldData = [0]*numHeightfieldRows*numHeightfieldColumns
for j in range (int(numHeightfieldColumns/2)):
for i in range (int(numHeightfieldRows/2) ):
height = random.uniform(0,heightPerturbationRange)
heightfieldData[2*i+2*j*numHeightfieldRows]=height
heightfieldData[2*i+1+2*j*numHeightfieldRows]=height
heightfieldData[2*i+(2*j+1)*numHeightfieldRows]=height
heightfieldData[2*i+1+(2*j+1)*numHeightfieldRows]=height
terrainShape = p.createCollisionShape(shapeType = p.GEOM_HEIGHTFIELD,
meshScale=[0.3,0.3,1], # [.05,.05,1],
heightfieldTextureScaling=(numHeightfieldRows-1)/2,
heightfieldData=heightfieldData,
numHeightfieldRows=numHeightfieldRows,
numHeightfieldColumns=numHeightfieldColumns)
terrain = p.createMultiBody(0, terrainShape)
p.resetBasePositionAndOrientation(terrain,[0,0,0], [0,0,0,1])
return terrain
p.resetSimulation()
terrain = set_height_field(p)
husky = p.loadURDF('husky/husky.urdf', [1, -1, 1.0]) # , [0, 0, 0.5])
print(f"husky unique ID: {husky}")
for i in range(p.getNumJoints(husky)):
joint = Joint(*p.getJointInfo(husky, i))
print('\t', joint)
1
2
3
4
5
6
7
8
9
10
11
12
husky unique ID: 1
Joint(index=0, name='chassis_joint', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='base_link', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.0, 0.0, 0.14493), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=-1)
Joint(index=1, name='imu_joint', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='imu_link', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.08748, 0.00085, 0.09053), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=0)
Joint(index=2, name='front_left_wheel', type=0, gIndex=7, uIndex=6, flags=1, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='front_left_wheel_link', axis=(0.0, 1.0, 0.0), parentFramePosition=(0.34348, 0.28625, -0.06665), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=0)
Joint(index=3, name='front_right_wheel', type=0, gIndex=8, uIndex=7, flags=1, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='front_right_wheel_link', axis=(0.0, 1.0, 0.0), parentFramePosition=(0.34348, -0.28454999999999997, -0.06665), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=0)
Joint(index=4, name='rear_left_wheel', type=0, gIndex=9, uIndex=8, flags=1, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='rear_left_wheel_link', axis=(0.0, 1.0, 0.0), parentFramePosition=(-0.16852, 0.28625, -0.06665), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=0)
Joint(index=5, name='rear_right_wheel', type=0, gIndex=10, uIndex=9, flags=1, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='rear_right_wheel_link', axis=(0.0, 1.0, 0.0), parentFramePosition=(-0.16852, -0.28454999999999997, -0.06665), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=0)
Joint(index=6, name='top_plate', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='top_plate_link', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.08748, 0.00085, -0.09947), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=0)
Joint(index=7, name='user_rail', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='user_rail_link', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.35948, 0.00085, 0.14553), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=0)
Joint(index=8, name='front_bumper', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='front_bumper_link', axis=(0.0, 0.0, 0.0), parentFramePosition=(0.56748, 0.00085, -0.008470000000000005), parentFrameOrientation=(0.0, 0.0, 0.0, 1.0), parentIndex=0)
Joint(index=9, name='rear_bumper', type=4, gIndex=-1, uIndex=-1, flags=0, damping=0.0, friction=0.0, lowerLimit=0.0, upperLimit=-1.0, maxForce=0.0, maxVelocity=0.0, linkName='rear_bumper_link', axis=(0.0, 0.0, 0.0), parentFramePosition=(-0.39252, 0.00085, -0.008470000000000005), parentFrameOrientation=(0.0, 0.0, 0.9999999999991198, -1.3267948966775328e-06), parentIndex=0)
1
show_render(p)
1
2
3
width : 320, height: 200
rgba shape=(200, 320, 4), dtype=uint8
1
2
depth shape=(200, 320), dtype=float32, as values from 0.0 (near) to 1.0 (far)

1
2
mask shape=(200, 320), dtype=int32, as unique values from 0 to N-1 entities, and -1 as None

6. How to Set Gravity
헌데 보면 차가 공중에 떠있다.
r2d2로봇의 경우 Center Of Gravity (COG)가 0.5m 위에 있지만
husky는 그렇지 않기 때문이다.
로봇을 위치를 z= 0 이되도록 옮기거나 중력을 설정하면 된다.
중력을 설정하고 로봇이 어떻게 움직이는지 보자.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
import imageio
# Set the gravity to Earth's gravity.
fps = 20
gravity = -9.807
p.setGravity(0, 0, gravity)
p.setTimeStep(1 / fps)
cam_width = 320
cam_height = 200
# Run the simulation for a fixed amount of steps.
images = []
for i in range(20):
position, orientation = p.getBasePositionAndOrientation(husky)
x, y, z = position
roll, pitch, yaw = p.getEulerFromQuaternion(orientation)
print(f"{i:3}: x={x:0.10f}, y={y:0.10f}, z={z:0.10f}), roll={roll:0.10f}, pitch={pitch:0.10f}, yaw={yaw:0.10f}")
cam_view_matrix = p.computeViewMatrixFromYawPitchRoll(cameraTargetPosition=[0, 0, 0],
distance=4,
yaw=60,
pitch=-10,
roll=0,
upAxisIndex=2,
)
cam_projection_matrix = p.computeProjectionMatrixFOV(fov=60,
aspect=cam_width/cam_height,
nearVal=0.01,
farVal=100,
)
img = p.getCameraImage(cam_width, cam_height, cam_view_matrix, cam_projection_matrix)[2]
images.append(img)
p.stepSimulation()
imageio.mimsave('husky_falling.gif', images)
# show_render(p)
from IPython.display import Image as display_image
display_image('husky_falling.gif')
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
0: x=1.0000000000, y=-1.0000000000, z=1.0000000000), roll=0.0000000000, pitch=-0.0000000000, yaw=0.0000000000
1: x=1.0000000000, y=-1.0000000000, z=0.9754825000), roll=-0.0000000000, pitch=0.0000000000, yaw=0.0000000000
2: x=1.0000000000, y=-1.0000000000, z=0.9265205793), roll=-0.0000000000, pitch=0.0000000000, yaw=0.0000000000
3: x=1.0000000000, y=-1.0000000000, z=0.8532349732), roll=-0.0000000000, pitch=0.0000000000, yaw=0.0000000000
4: x=1.0000000000, y=-1.0000000000, z=0.7557932696), roll=-0.0000000000, pitch=0.0000000000, yaw=0.0000000000
5: x=1.0000000000, y=-1.0000000000, z=0.6344087447), roll=-0.0000000000, pitch=0.0000000000, yaw=0.0000000000
6: x=1.0000000000, y=-1.0000000000, z=0.4893388571), roll=-0.0000000000, pitch=0.0000000000, yaw=0.0000000000
7: x=1.0000000000, y=-1.0000000000, z=0.3208834200), roll=-0.0000000000, pitch=0.0000000000, yaw=0.0000000000
8: x=1.0000000000, y=-1.0000000000, z=0.1293824832), roll=-0.0000000000, pitch=0.0000000000, yaw=0.0000000000
9: x=1.0110932110, y=-0.9891509801, z=0.1321506251), roll=0.0006308830, pitch=-0.0003285125, yaw=-0.0486756768
10: x=1.0231584604, y=-0.9790928004, z=0.1494433999), roll=-0.0168233515, pitch=-0.0115365024, yaw=-0.0879384229
11: x=1.0347566403, y=-0.9715847847, z=0.1577502105), roll=-0.0442984255, pitch=-0.0225694514, yaw=-0.1257284837
12: x=1.0441179675, y=-0.9657316567, z=0.1571676148), roll=-0.0784225725, pitch=-0.0241735412, yaw=-0.1577819432
13: x=1.0515769233, y=-0.9613052055, z=0.1525780425), roll=-0.1175661333, pitch=-0.0154108548, yaw=-0.1859225125
14: x=1.0581924079, y=-0.9564833564, z=0.1468545112), roll=-0.1560738071, pitch=-0.0025725752, yaw=-0.2131697551
15: x=1.0647853658, y=-0.9508700861, z=0.1406801442), roll=-0.1946624320, pitch=0.0120081085, yaw=-0.2396239364
16: x=1.0711680888, y=-0.9462305934, z=0.1389841200), roll=-0.2089362537, pitch=0.0166377268, yaw=-0.2513576113
17: x=1.0735334429, y=-0.9452467284, z=0.1390465223), roll=-0.2126924223, pitch=0.0175227322, yaw=-0.2552238744
18: x=1.0735022071, y=-0.9452188232, z=0.1389019501), roll=-0.2120871931, pitch=0.0176985171, yaw=-0.2555059454
19: x=1.0734620350, y=-0.9452093575, z=0.1388371824), roll=-0.2116432454, pitch=0.0174927155, yaw=-0.2557765504
1
<IPython.core.display.Image object>
default fps가 240hz 로 굉장이 빨라서 setTimeStep 함수를 사용하여 20hz로 설정하고 이동 경과를 출력했다.
현재 로봇의 위치는 다음과 같이 설정 되었다.

7. How to set Camera
camera에 대한 default setting은 다음과 같다. [width, height, viewMatrix, projectionMatrix, cameraUp, cameraForward, horizontal, vertical, yaw, pitch, dist, target]
1
print(p.getDebugVisualizerCamera())
1
2
(1024, 768, (0.642787516117096, -0.4393851161003113, 0.6275069713592529, 0.0, 0.766044557094574, 0.36868777871131897, -0.5265407562255859, 0.0, -0.0, 0.8191521167755127, 0.5735764503479004, 0.0, 2.384185791015625e-07, 2.384185791015625e-07, -5.000000476837158, 1.0), (0.7499999403953552, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, -1.0000200271606445, -1.0, 0.0, 0.0, -0.02000020071864128, 0.0), (0.0, 0.0, 1.0), (-0.6275069713592529, 0.5265407562255859, -0.5735764503479004), (17141.001953125, 20427.853515625, -0.0), (-8787.701171875, 7373.75537109375, 16383.041015625), 50.0, -35.0, 5.0, (0.0, 0.0, 0.0))
다음과 같은 방법으로 카메라의 위치를 바꾸어 볼 수도 있으며
매 스텝 로봇의 바디를 따라다니게 할 수도 있다.
1
p.resetDebugVisualizerCamera(4, 50, -35, [0,0,0])
8. How to Set Local Frame
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
def set_local_frame(p, robot):
# start, orient = p.getBasePositionAndOrientation(robot)
start, orient, *_ = p.getLinkState(robot, 1) # 1 is base frame of imu
rot_mat = np.array(p.getMatrixFromQuaternion(orient)).reshape(3,3)
colors = np.eye(3)
ends = start + rot_mat.T@colors
for i, end in enumerate(ends):
p.addUserDebugLine(start,
end,
colors[i],
lineWidth=2.0,
parentObjectUniqueId=husky)
set_local_frame(p, husky)
show_render(p)
1
2
3
width : 320, height: 200
rgba shape=(200, 320, 4), dtype=uint8

1
2
depth shape=(200, 320), dtype=float32, as values from 0.0 (near) to 1.0 (far)

1
2
mask shape=(200, 320), dtype=int32, as unique values from 0 to N-1 entities, and -1 as None

1
p.disconnect()

Leave a comment