
Contents
Sort
Insertion sort
incremental하게 하나씩 원소를 삽입하며 정렬하는 방식
즉, $j$ 번째 이전에 이미 정렬되어있는 상태에서 $A_j$를 삽입한후 제자리를 찾아가는 방식

1
2
3
4
5
6
7
8
9
10
11
insert(A, j, key)
i = j - 1
while i > 0 and A[i] > key
A[i+1] = A[i]
i = i - 1
A[i+1] = key
IS(A)
for j = 2 to n
insert(a, j, a[j])
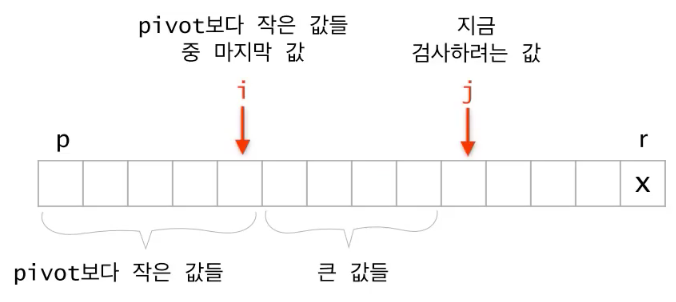
Quicksort (increasing order)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
QS(a, p, r)
if p >= r
return
# select random btw p ~ r
i = random(p,r)
swap(a[i], a[r]) # 무조껀 뒤로 보냄
# partition
i = p - 1
for j = p to r-1
if a[j] <= a[r]
i += 1
swap(a[j], a[i])
swap(a[i+1], a[r])
q = i + 1 # a[q] finds a right position
# divide and conquer
QS(a, p, q-1)
QS(a, q+1, r)
randomized quick sort가 아닐 경우 worst case time complexity
i 번째 원소에서 분할이 될 때 점화식은 다음과 같다.
$T(n) = T(i-1) + T(n-i) + O(n)$
최악의 경우 $i = 1 \,or \,n$ 이고 다음과 같다.
$T(n) = T(n-1) + O(n)$
반복대치를 통해 시간복잡도를 구해보자 \(\cancel{T(0)} = 0\\ \cancel{T(1)} = \cancel{T(0)} + O(1)\\ \cancel{T(2)} = \cancel{T(1)} + O(2)\\ ...\\ T(n) = \cancel{T(n-1)} + O(n)\\ -------------\\ T(n) = O(1)\, + \,...\, + \,O(n) = O(n^2)\)
proof by mathmatical induction 방법을 통해 randomized quicksort 의 expected time complextiy 증명 \(Suppose \;\exist c \;s.t\; T(k) \le ck\log{k} \;\forall \;2\le k <n\) $T(n) = T(i-1) + T(n-i) + O(n)$ 에서 i는 1 부터 n 중에서 uniform하게 선택되기 때문에 \(\begin{matrix} T(n) &=& \frac{1}{n}\sum_{i=1}^n {T(i-1) + T(n-i)} + O(n)\\ &=& \frac{2}{n}\sum_{k=0}^{n-1}T(k) + O(n)\\ &=& \frac{2}{n}\sum_{k=2}^{n-1}T(k) + \{O(0) + O(1) + O(n)\}\\ &\le& \frac{2}{n}\sum_{k=2}^{n-1}ck\log{k} + O(n)\leftarrow 가정\\ &\le& \frac{2}{n}\sum_{k=1}^{n-1}ck\log{k} + O(n)\\ &=& \frac{2c}{n}\{\sum_{k=1}^{[\frac{n}{2}]-1}k\log{k} + \sum_{k=[\frac{n}{2}]}^{n-1}k\log{k}\} + O(n)\\ &\le& \frac{2c}{n}\{\sum_{k=1}^{[\frac{n}{2}]-1}k\log{\frac{n}{2}} + \sum_{k=[\frac{n}{2}]}^{n-1}k\log{n}\} + O(n)\leftarrow \sum_{k=1}^{[\frac{n}{2}]-1}\log{k} \le \log{\frac{n}{2}}이므로\\ &=& \frac{2c}{n}\{\sum_{k=1}^{[\frac{n}{2}]-1}k(\log{n} - 1) + \sum_{k=[\frac{n}{2}]}^{n-1}k\log{n}\} + O(n)\\ &=& \frac{2c}{n}\{\log{n}\sum_{k=1}^{n-1}k - \sum_{k=1}^{[\frac{n}{2}]-1}k\} + O(n)\\ &\le& \frac{2c}{n}\{\log{n}\frac{n(n-1)}{2} - \frac{1}{2}(\frac{n}{2}- 1)(\frac{n}{2})\} + O(n) \leftarrow [\frac{n}{2}] \le \frac{n}{2} 이므로 \\ &=& c(n\log{n} -\log{n} - \frac{n}{8} + \frac{n}{4}) + O(n)\\ &=& O(n\log{n}) \end{matrix}\)
다른방식으로 expected running time $O(nlogn)$ 증명
intuition: quick sort에서 parition 은 $O(n)$ 번 불리게 되어있다. 이때, qicksort의 성능은 pivot이 어디 선택되어 partition 내부 안에서 비교 횟수가 몇번 불리느냐에 달려있다. 모든 $n$ 번의 patition에서 비교 횟수가 불리는 수의 합을 $X$ 라 하면, time complexity는 $O(n+X)$ 이다.
그래서 call 되는 patition 함수들 안에서 비교되는 횟수의 합의 평균 $E[X] $가 성능을 좌우한다. 이 값을 구하기위해 그 안에서 정렬된 숫자를 ${z_i, …,z_j}$ 라고 하면,
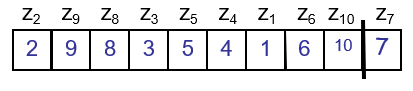
그리고, $E[X]$를 estimate하기위해 i.i.d. $ X_{ij} = 1$ (if $z_i$ is compared to $z_j$, o.w., 0) 를 정의하면 ($P[$ $z_i$ is compared with $z_j] = P_{ij}$ 라 하자, iid 특성은 평균값이 확률값과 같음)
$E[X] = E[\sum_{i=1}^{n-1}\sum_{j=i+1}^{n}X_{ij}] = \sum_{i=1}^{n-1}\sum_{j=i+1}^{n}E[X_{ij}] = $ $\sum_{i=1}^{n-1}\sum_{j=i+1}^{n}$$P_{ij}$ 이되는데,

위의 그림으로 부터 알 수 있는 것은, 서로 다른 partition에 있는 $z_i$ 와 $z_j$ 는 절대 비교 안된다는 사실로부터 partition 함수 안에 $z_i$, $z_j$ 가 있어야하며 둘중 하나는 반드시 pivot이 될것 이라는 사실이다. 따라서, $j-i+1$ element 중 $z_i, z_j$가 각각 pivot으로 뽑힐 확률인 $P_{ij} = 2/(j-i+1)$ 이다.
다시 되돌아가서, 계산해보면, $\sum_{i=1}^{n-1}\sum_{j=i+1}^{n}$$2/(j-i+1)$ $\le \sum_{i=1}^{n} \sum_{i \le j}{2/j} = O(nlogn)$
더 나아가서 …
r.f. 항상좋은 quick sort 방법은? median of median 이용 link
Mergesort
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
Merge(A, p, q, r)
n1 = q - p + 1
n2 = r - q
let L[1 .. n1 + 1] and R[1 ..n2 + 1] be new arrays
for i = 1 to n1
L[i] = A[p + i - 1]
for j = 1 to n2
R[j] = A[q + j]
L[n1 + 1] = Inf
R[n2 + 1] = Inf
i,j = 1
for k = p to r
if L[i] <= R[j]
A[k] = L[i]
i += 1
else
A[k] = R[j]
j += 1
MS(A, p, r)
if p >= r
return
q = (p + r) / 2;
MS(A, p, q);
MS(A, q + 1, r);
Merge(A, p, q, r);
time complexity
마스터정리를 사용하여 시간복잡도를 구해보자. \(T(n) = 2 T(\frac{n}{2}) + O(n)\\ f(n) = O(n)\\ h(n) = n^{\log_{2}{2}} = O(n) = f(n)\\ \therefore T(n) = O(n\log{n})\)
Heapsort
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
# increasing order sort를 위한 max heap 을 기준으로 설명
heapify(A, i)
left = 2i
right = 2i + 1
if right > n
return
# find largest among A[i], A[left], A[right]
if A[i] < A[left]
largest = left
else
largest = i
if A[largest] < A[right]
largest = right
swap(A[i], A[largest])
if largest != i
heapify(A, largest)
# bottom up
build_heap(A)
A.heapsize = |A|
for i = A.length / 2 downto 1
heapify(i)
# divide and conquer
make_heap(A, i)
left = 2i
right = 2i + 1
if right > n
return
make_heap(left)
make_heap(right)
if A[i] < A[left]
largest = left
else largest = i
if A[largest] < A[right]
largest = right
swap(A[i], A[largest])
if largest != i
heapify(A, largest)
HS(A)
build_heap(A)
for i = |A| downto 2
swap(A[1], A[i])
A.heapsize -= 1
heapify(A,1)
heapify: $T(n) = T(n/2) + 1 = O(logn)$
build_heap: $T(n) = 2T(n/2) + O(logn)$ \(n^{log_2^2} > logn \\ \therefore T(n) = O(n)\) divide conquer 를 통한 build heap c++
Dynamic Programming
divide and conquer(recursive call, top down) 에서 memo를 하면 DP 가 된다.
따라서 크게 top down with memo, bottom up 2가지 접근법
DP를 사용하려면 Optimal substructure, Overlapping subproblem 2가지 성질을 증명해야함
Rod cutting
막대 길이에 대한 가격 $p[1..n]$ 이 주어졌을때, 최대한 비싸게 막대를 잘라서 팔아먹는 가격 $r_n$
cut을 한 경우과 안할 경우로 나누어 더 좋은것 선택 하면 다음과 같은 식으로 reculsive formula 가능 $r_n = \max(p_n, \underset{1 \le i < n}{\max}{(r_i + r_{n-i})}) \text{, if } n \ge 1$,
$i=n$을 포함 시키고, $r_i$부분을 $ p_i$로 바꾸고, $ p_n +r_0 = p_n$으로 하면, 수식 간략화가 가능하다. \(\begin{aligned} r_n &= \begin{cases} \underset{1 \le i \le n}{\max}(p_i + r_{n-i}) & \text{if } n \ge 1 \\ 0 & \text{if } n = 0\\ \end{cases} \end{aligned}\)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
# topdown with memo
lookup(p, n, r)
# 저장되어 있다면 저장된 값 return
if r[n] >= 0
return r[n]
# base case
if n == 0
return 0
q = -INF
for i = 1 to n
q = max(q, p[i] + lookup(p, n-i, r))
# memo
r[n] = q
return q
rodcut(p, n)
let r[0..n] be a new array
# initialization
for i = 0 to n
r[i] = -INF
return lookup(p, n, r)
# bottom up
rodcut(p, n)
let r[0..n] be a new array
r[0] = 0
for j = 1 to n
q = -INF
# lookup with memo
for i = 1 to j
q = max(q, p[i] + r[j-i])
r[j] = q
return r[n]
entry 갯수 $n$, 각 entry 계산하는데 $O(n)$ 걸린다. 따라서, $T(n) = O(n^2)$
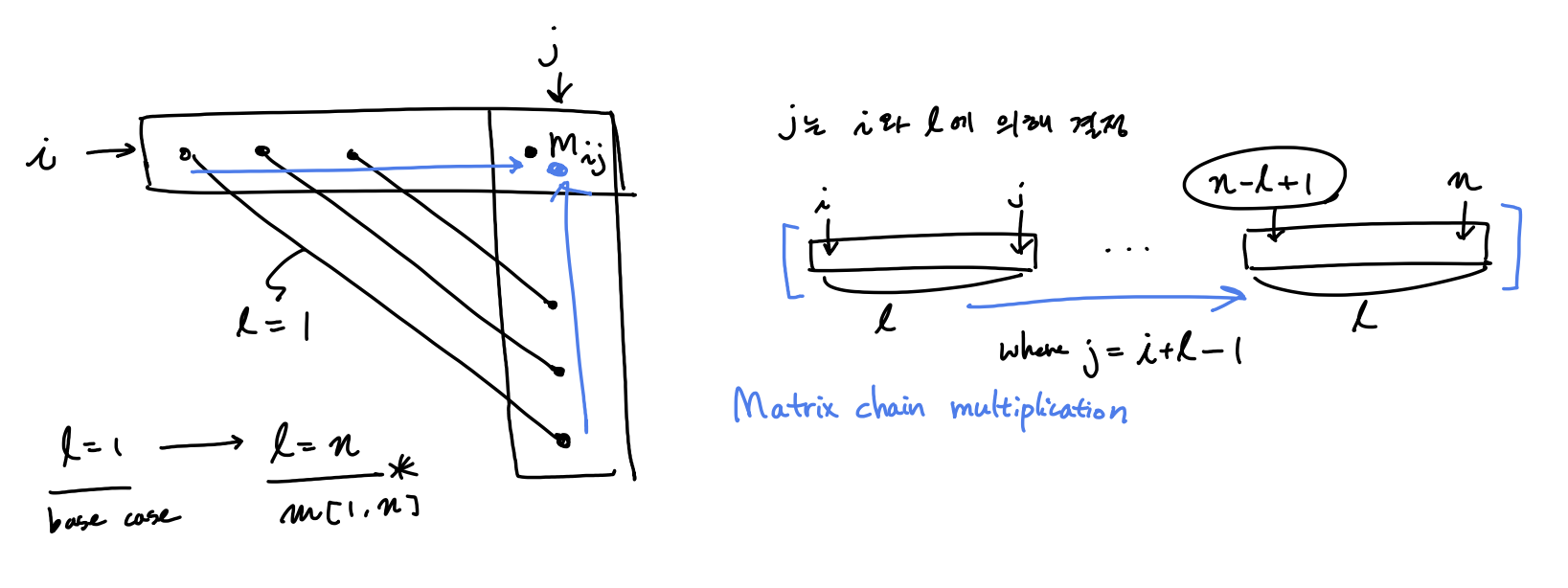
Matrix-chain multiplication
matrix multiplication 할때, 계산을 효율적으로 하기위해 parenthesization 을 어떻게 효율적으로 할 것인가? $m[i, j]$ 는 matrix chain multiplication $A_i A_{i+1} ..A_j $을 계산하는데 필요한 cost
$A_i \in \mathbb{R}^{p_{i-1} \times p_i}$ \(m[i,j] = \begin{cases} 0 & \text{if }i=j \\ \underset{i \le k <j}{\min}{(m[i,k] + m[k+1,j] + p_{i-1}p_kp_j)} & \text{if } i<j\\ \end{cases}\) $( A_i A_{i+1} ..A_k )$$( A_{k+1} A_{k+2} ..A_j )$ 에 대한 cost $m[i,k] + m[k+1,j] + p_{i-1}p_kp_j$
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
# topdown with memo
lookup(p, m, i, j)
# 저장되어있다면 저장된 값 사용
if m[i,j] < INF
return m[i,j]
# base case
if i == j
return 0
q = INF
for k= i to j-1
q = min(q, lookup(p, m, i, k) + lookup(p, m, k+1, j) + p[i-1]*p[k]*p[j])
m[i,j] = q
return q
MatrixChain(p, n)
let m[1..n, 1..n] be a new n × n array
all m[:,:] be initialized by INF
return lookup(p, m, 1, n)
# bottom up
MatrixChain(p) # p = [p[0], ..., p[n]]
n = |p|-1
# base case (chain length l = 1 일때)
for i = 1 to n
m[i,i] = 0
for l = 2 to n
for i = 1 to n-l+1
j = i+l-1
m[i,j] = INF
for k = i to j-1
q = min(q, m[i, k] + m[k+1, j] + p[i-1]*p[k]*p[j])
m[i,j] = q
return m[1,n]
bottom up 방식이 좀 어려울수 있다.
chain length $l = 1, …, n$ 까지 minimum cost를 업데이트 하면 optimal cost를 찾을 수 있다.
$T(n) = O(n^3)$
Longest Common Subsequence
$C_{i,j}$ 는 $X_i$ 와 $Y_j$의 LCS 길이 $X_i = <x_1, …, x_i>, Y_j = <y_1, …, y_j>$ \(C_{i,j} = \begin{cases} 0, &\mbox{if } i = 0 \or j = 0 \\ C_{i-1,j-1} + 1 &\mbox{if } i,j > 0 \and x_i = y_j \\ \max\{C_{i-1,j}, C_{i, j-1}\} &\mbox{if } i,j > 0 \and x_i \neq y_j \end{cases}\)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
# topdown with memo
lookup(X, Y, c, i, j)
if c[i,j] >= 0
return c[i,j]
# base case
if i==0 or j==0
c[i,j] = 0
return c[i,j]
# i > 0 or j > 0
if X[i] == Y[j]
c[i,j] = lookup(X, Y, c, i-1, j-1) + 1
return c[i,j]
else
c[i,j] = max(lookup(X, Y, c, i-1, j), lookup(X, Y, c, i, j-1))
return c[i,j]
LCS(X, Y)
m = |X|
n = |Y|
let c[0..m, 0..n] be a new array
# initialization
all c[:,:] be initialized by -INF
return lookup(X, Y, c, m, n)
# bottom up
LCS(X, Y)
m = |X|
n = |Y|
let c[0..m, 0..n] be a new array
all c[:,:] be initialized by -INF
# base case
if i == 0 to m
c[i,0] = 0
if j == 0 to m
c[0,j] = 0
for i = 1 to m
for j = 1 to n
if X[i] == Y[j]
c[i,j] = c[i-1, j-1] + 1
else
c[i,j] = max(c[i-1, j], c[i, j-1])
return c[m,n]
$T(n) = O(mn)$
Assembly Line
pdf 참조
0 - 1 knapsack
0-1 Knapsack problem is not satisfied with Greedy choice property
$i$ 는 item index, $w$ 는 possible weight, $v_i$는 item $i$ 의 가격
$c[i,w]$ 는 item $i$개를 주머니에 넣고, 주머니에 담을수 있는 weight가 $w$ 일때의 주머니 안의 물건들 가격
\(c[i,w] =
\begin{cases}
0 &\text{if }i=0 ~ \or w=0 \\
c[i-1,w] &\text{if } i > 0 ~ \and w < w_i \\
max(v_i + c[i-1,w-w_i], c[i-1,w]) &\text{if } i > 0 ~ \and w \ge w_i
\end{cases}\)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
# topdown with memo
# V[i], W[i]는 item i에 대한 pric와 weight 정보 array
# W(array)와 w(scalar)는 다르다.
lookup(V, W, c, i, w)
if c[i,w] >= 0
return c[i,w]
# base case
if i==0 || w==0
c[i,w] = 0
return 0
if W[i] > w
c[i,w] = lookup(V, W, c, i-1, w)
return c[i,w]
else
c[i,w] = max(V[i] + c[i-1, w-W[i]], c[i-1, w])
return c[i,w]
knapsack(V, W, maxW)
n = |V|
let c[0..n, 0..maxW] be a new array
all c[..] initialized by -INF
return lookup(V, W, c, n, maxW)
# bottom up
knapsack(V, W, maxW)
n = |V|
let c[0..n, 0..maxW] be a new array
all c[..] initialized by -INF
for i = 0 to n
for w = 0 to maxW
if i==0 || w==0
# base case
c[i,w] = 0
else
if W[i] > w
c[i,w] = c[i-1, w]
else
c[i,w] = max(V[i] + c[i-1, w-W[i]], c[i-1, w])
return c[n, maxW]
$T(n) = O(nW_{max})$
Greedy
Activity Selection Problem
여러 starting time, finish time 을가진 activity $a = [s,f]$들이 있을 때 주어진 시간내에 compatible 한 activity들을 가장 많이 포함시킬 수 있도록 scheduling 하는 문제
naive 하게 생각 해보면 $n$개의 activity들 이 있을때 $2^n$ 가지의 모든 subset 에서 각 subset 마다 가지고있는 activity들이 서로 compatible한지 검사하고, 모든 activity들이 compatible하다면 그 갯수를 저장하고, 그 중 최대를 갖는 subset를 찾는다.
| $S_k | _{k=[1,2^n]} = { \text{최대 n 개의 activity} }$ |
이때, ${ .. }$안의 각 activity들이 서로 compatible 한가 test (All pair로 검사한다면, $O(n^2)$걸림 )
따라서, $O(2^n n^2)$ 이므로 너무 비싸다.
조금 나아가 생각해보면, activity 들이 만약 finishing time에 의해 sorting 되어 있다고 가정해보자.
그러면 compatible test 에서 linear하게 scan하면 된다. ($i$번째에서 starting time이 $i-1$번째의 finishing time보다 앞선 다면 compatible하지 않은 것이므로 즉, $a_i.s < a_{i-1}.f$ 이면 non compatible 함)
따라서, $O(2^n n)$ 으로 약간 개선된다. (activity 들이 만약 finishing time에 의해 sorting 되어 있다고 가정한 상황이므로 sorting 시간 무시)
DP 이용
여기서 더 개선 하기 위해선, 모든 subset을 보지 않고, overlapping되는 subproblem들을 이용한다.
(새롭게 notation을 정의함)
가정 상황: activity 들이 finishing time에 의해 sorting 되어 있다.
여기선 어떻게 문제를 정의 하느냐에따라 time complexity가 달라질 수 있다.
**approach1 **교재의 방식은
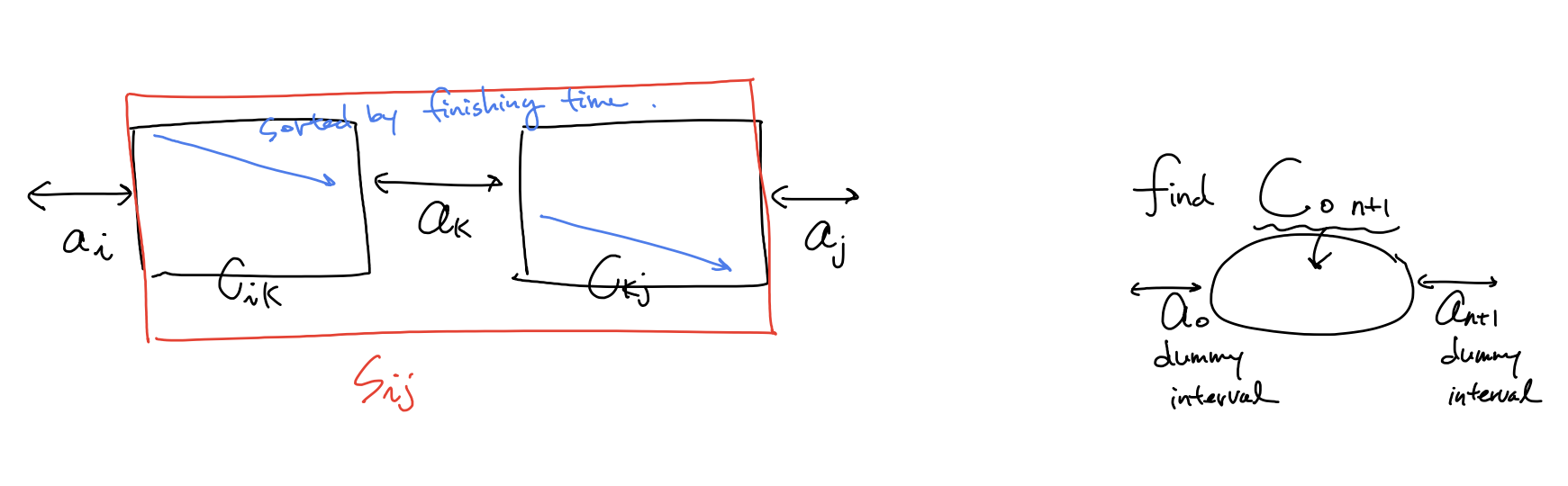
$S_{0,n+1}$ 의 원소 갯수가 최대가 되도록 선택을 하고 싶다! (dummy 원소 $a_0, a_{n+1}$ 두고)
$c[i,j]$를 $S_{ij}$ 안에서 compatible한 activity들의 최대수로 정의 \(c[i,j] = \begin{cases} 0 & \text{if}~ S_{ij} = \empty \\ \underset{i < k < j ~ s.t. ~ a_k ∈ S_{ij}}{\max}(c[i,k] + c[k,j] + 1) & \text{if}~ S_{ij} \neq \empty \end{cases}\) $T(n) = O(n^3) $
approach2 또 다른 방식으로 entry수를 $n$으로 줄여 보았다.
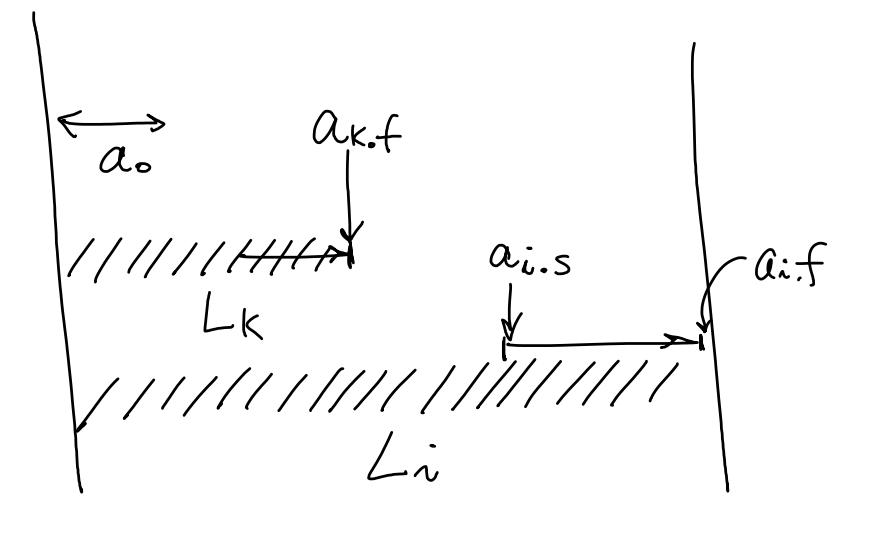
$L_i$ 는 $a_i$를 포함 하는 $0,…, i $에 대해 compatible 한 activity 갯수
따라서, $L[0..n]$까지 업데이트 후에 가장 max인 값을 택해야한다.
$$
\begin{aligned}
L_i &=
\begin{cases}
\underset{0 \le k<i ~ s.t ~ a_k.f \le a_i.s}{\max}{(L_k + 1)} & \text{if } a_0.f \le a_i.s &\text{#하나라도 compatible 한 activity존재}
1 & \text{o.w}
\end{cases}
result &= \underset{1 \le i \le n}{\max}{L_i}
\end{aligned} $$ $T(n) = O(n^2) $
greedy choice이용
greedy choice는 compatible한 activity중 finishing time이 가장 빠른것을 선택.
redefine for greedy algorithm
$S_{ij} -> S_k $ = {$a_i ∈ S: s_i \ge f_k $}
If we use greedy algorithm, DP formula can be transformed.
\[\begin{aligned} c[0,n+1] &= c[0,m_1] + c[m_1, n+1] + 1 &m_1\text{ is greedy choice} \\ &= c[m_2, n+1] + 1 + 1 &m_2\text{ is greedy choice}\\ &= c[m_3, n+1] + 1 + 1 + 1 &m_3\text{ is greedy choice}\\ &= ~ ... \\ &= c[m_m, n+1] + m \end{aligned}\]note that $c[0,m] = 0, c[m_1,m_2] = 0, … ,c[m_{m-1},c_m] = 0$ , where $m \le n $
따라서, entry를 줄일 수 있다(entries are decreased by O(n), each entry takes O(1)).
greedy algorithm에 대한 recursive formula 를 적어보았다.
$$
\begin{aligned}
m_k &=
\begin{cases}
0 & \text{if } k=0 &\text{ base case}
k & \text{if } a_{m_{k-1}.f} \le a_k.s &\text{find a first compatible activitiy}
m_{k-1} & \text{o.w }
\end{cases} \
A_k &=
\begin{cases}
A_{k-1} + 1 & \text{if } a_{m_{k-1}}.f \le a_k.s &# k\text{ is greedy choice}
A_{k-1}
\end{cases}
\end{aligned}
$$
$A_n$ 값을 찾으면 된다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
# recursive version
def Recursive_Greedy(s,f,k,n)
m = k+1
# Find appropriate m for using optimal sol
# m은 compatible한 activity중 finishing time이 가장 빠른 activity index
while m <= n and s[m] < f[k]
m = m + 1
if m <= n
return 'a_m' union Recursive_Greedy(s,f,m,n)
else:
return None
# iterative version
def Iterative_Greedy(s,f)
n = |s|
A = 'a_1' # A always has a1
k = 1
for m = 2 to n:
if s[m] >= f[k]:
A = A union 'a_{}'.format(m)
k = m
return A
Therefore, \(T(n) = O(n), \text{ suppose that prepressing sortng }~ a_k \text{ with finishing time }\) c++
Fractional Knapsack
Fractional Knapsack Problem through Greedy algorithm
Greedy choice : first of all, an item with higher Unit price per weight must be selected
preprocessing으로 quick sort를 이용하여 무게당 가격이 높은 순으로 $O(nlogn)$시간에 sorting하고,
그 순서대로 아이템을 $O(n) $시간에 linear scan하며 물건을 담을 수있다면 물건을 담고, 아니면 일부만 담는다.
notation은 0-1 knapsack problem 과 동일
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
# assume that V[i], W[i] sort by decreasing order with (V[i]/W[i])
knapsack(V, W, maxW) {
n = |V|
residualw = maxW;
profit = 0
for i = 1 to n
# 담을 수 있다면, 담는다.
if W[i] <= residualw
profit = profit + V[i]
residualw = residualw - W[i]
# 담을 수 없다면, 일부만 담고 종료
else {
# w[i] > residualw
profit += V[i]*(residualw/w[i]);
break;
}
}
return result;
Graph
Implementation Pros and Cons
Describe the linked list representation of a graph
각 정점에 인접한 정점들을 2차원 배열의 자료구조로 표현하는 방법이다.
정점의 개수가 n개인 그래프가 주어졌을 때 n$\times$ n matrix를 준비한다.
가중치가 없는 그래프라면 가중치의 값을 항상 1로 할당한다.
정점 i에서 정점 j로 가는 간선이 존재하면 그 가중치의 값을 원소의 값으로 할당한다.
간선이 존재하지 않으면 값을 0으로 할당한다.
- Advantage
- 간선의 존재여부를 확인하는데 상수 시간 (O(1))이 소요된다.
- Disadvantage
- 그래프를 생성하는데 $n^2$ 의 메모리와 O($n^2$) 의 시간이 소요된다.
Describe the adjacency matrix representation of a graph
각 정점에 인접한 정점들을 리스트로 표현하는 방법이다.
정점의 개수가 n개인 그래프에서 n 길이의 list를 준비한다.
각 정점에 인접한 정점들을 연결리스트로 매단다.
각 노드는 정점번호, 가중치, 다음 정점의 포인터 로 구성된다.
필요한 총 노드 수는 총 간선수의 두배이다.
- Advantage
-
그래프를 생성하는데 2 E 만큼의 메모리가 소요되므로 간선 수가 적은 경우 유용하다.
-
- Disadvantage
-
간선 수가 많은 경우 ( E > V ) 오히려 필요한 오버헤드가 크다. - 간선의 존재여부를 확인 하는데 O(n) 시간이 소요된다.
-
BFS
Queue를 이용하여 search 혹은 shortest path 찾음
가장 쉬운 알고리즘으로는 모든 edge weight(distance)를 1로 둔 방식
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
BFS(G, s)
let visited[1 ..|G.V|] be a boolean array and all initialized by False
create queue Q
Q.push(s)
visited[s] = True
while !Q.empty()
u ← Q.pop()
# update u.d timing
# print u
for v in G.adj[u]
# 이전에 방문한적이 없다면 방문
if visited[v] == False
Q.push(v)
visited[v] = True
# for forest G
BFSAll(G)
let visited[1 ..|G.V|] be a boolean array and all initialized by False
for s in G.V
if visited[s] == False
# 기존 BFS에 visited를 argument로 import하여 사용
BFS(G, s, visited)
| adjacent list 자료구조를 사용한 graph라면 모두 한번씩 보게 되므로 $T(n) = O( | V | + | E | )$ |
DFS
stack을 이용하여 search 혹은 shortest path 찾음
DFS can be implemented by recursive call without stack
because recursive call means using a stack in our main memory(stack field)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
# iterative version
DFS(G, s)
let visited[1 ..|G.V|] be a boolean array and all initialized by False
create stack S
S.push(s)
visited[s] = True
while !S.empty()
u ← S.pop()
# update u.d timing
# print u
visited[u] = True
for v in G.adj[u]
# 이전에 방문한적이 없다면 방문
if visited[v] == False
S.push(v)
# recursive version
# function call시 내재된 stack이용
Util(G, u, visited)
# similar with u ← S.pop()
# update u.d timing
# print u
visited[u] = True;
for v in G.adj[u]
if visited[v] == False
Util(G, v, visited)
# update v.f set timing
# ..
return
DFS(G, s)
let visited[1 ..|G.V|] be a boolean array and all initialized by False
# similar with S.push(s)
Util(G, s, visited)
# for forest G
DFSAll(G)
let visited[1 ..|G.V|] be a boolean array and all initialized by False
for s in G.V
if visited[s] == False
# same with Until(G, s, visited)
DFS(G, s, visited)
| adjacent list 자료구조를 사용한 graph라면 모두 한번씩 보게 되므로 $T(n) = O( | V | + | E | )$ |
Topological Sort
DFS 를 쓰는 application 중 한가지인 Topological sort 방법
기본 가정: DAG(Directed Acyclic graph)에서만 쓸수 있다.
DAG에서 즉, 방향 그래프에 존재하는 각 정점들의 선행 순서를 위배하지 않으면서 모든 정점을 나열하는 것
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
topoDFS(G, u, visited, S)
visited[u] = True
for v in G.adj[u]
if visited[v] == False
topoDFS(G, S, visited, v)
# update v.f set timing
S.push(v)
TopoSort(G)
create stack S
create list L
let visited[1 ..|G.V|] be a boolean array and all initialized by False;
# DFS를 하면서 finishing time의 increasing order로 Stack S 에 넣는다.
# adjacent list 에서의 순서에 따라 search 순서가 다를 수 있으므로 생각할때는 다음과 같이 가정
# Let assume that the node with small number has a higher priority when DFS search
for u in G.V
if (visited[u] == false)
# DFS search starts at 'u' ...
topoDFS(G, u, visited, S)
# Stack S를 뒤집은 결과를 L이라하면, 이 결과가 곧 topolgical sort
while !S.empty()
L ← S.pop()
return L
| adjacent list 자료구조를 사용한 DFS 를 이용했으므로 $T(n) = O( | V | + | E | )$ |
c++ python greeksforgeeks 설명 한국어 블로그
Single Shortest Path
source vertex 로부터의 shortest path 와 distance를 찾아 내는 알고리즘
Bellman Ford
기본가정: no negative weight cycle(있다면 False return)
Dijkstra’s algorithm과 달리 Bellman Ford 알고리즘은 가중치가 음수인 경우에도 적용 가능. 음수 가중치가 사이클(cycle)을 이루고 있는 경우에는 작동하지 않는다.
naive 하게 그래프 정점 수만큼 그래프 내 모든 엣지에 대해 edge relaxation을 수행한다. 그러면 (negative weight cycle 이 없다는 가정하에) 모든 정점수 만큼의 relaxation을 돌았을때, shortest path를 찾을 수 있다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
Bellman(G, s)
# shortest distance 값을 저장할 array
let d[1 ..|G.V|] be a new array
# initialization
d[k] = INF for all k in G.V except for k == s
d[s] = 0
# edge relaxations for all cases O(VE)
for i = 1 to |G.V|
for (u,v) in G.E
if d[v] > d[u] + w(u,v)
d[v] = d[u] + w(u,v)
# check whether eixist negative weight cycle
# negative edge 가 있다면 edge relaxation을 했을때
# shortest path distance보다 작은 distance 가 존재 할 것이다.
for (u,v) in G.E
if d[v] > d[u] + w(u,v)
return False
return d
모든 cases 에 대해 edge relaxation을 수행해야하므로 $T(n) =O(VE)$
DAG
Topological sort를 사용하여 Bellman Ford 를 좀더 개선한 방식
기본가정: Topological sort를 사용해야하므로 DAG에 대해서만 사용가능
Bellman ford 알고리즘은 naive하게 모든 가능한 경우의 수에 대해서 edge relaxation 을 수행하였다.
DAG algorithm은 좀더 효율적이게 topolgical sort를 한 순서의 정점 리스트를 바탕으로 edge relaxation을 수행
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Bellman(g, s)
let d[1 ..|G.V|] be a new array
# initialization
d[k] = INF for all k in G.V except for k == s
d[s] = 0
# edge relaxations for a efficient way
L = TopoSort(G);
for u in L
for (u,v) in G.E
if d[v] > d[u] + w(u,v)
d[v] = d[u] + w(u,v)
return d
Topological sort를 한 List 순으로 진행되므로 $T(n) =O(V + E)$
Dijkstra
기본가정: 모든 edge가 non negative 이어야함 (가중치가 음수인 경우 작동하지 않는다)
priority queue 를 이용한 알고리즘
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
# version 1
Dijkstra(G, s)
# initialization
k.d = INF for all k in G.V except for k == s
s.d = 0
# vertices in set S have already shortest path distance
create set S
# priority queue Q(min heap)의 {key=vertex, value=vertex.d]}
# value가 낮을 수록 priority is higher
create priority queue Q
Q ← all G.V
while !Q.empty()
u = Q.pop()
S ← u
for v in G.adj[u]
if v not in S and v.d > u.d + w(u,v)
v.d = u.d + w(u,v)
# update distance of v in O(log|V|)
Q.update_value(v, v.d)
# version 2 (priority queue에 update_value 함수가 없는 경우)
# 대신, 느림
Dijkstra(G, s)
let d[1 ..|G.V|] be a new array
# initialization
d[k] = INF for all k in G.V except for k == s
d[s] = 0
# vertices in set S have already shortest path distance
create set S
# priority queue Q(min heap)의 {key=vertex, value=d[vertex]}
create priority queue Q
Q ← {s, d[s]}
while !Q.empty()
u = Q.pop()
S ← u
for v in G.adj[u]
if v not in S and d[v] > d[u] + w(u,v)
d[v] = d[u] + w(u,v)
# push updated {v, v.d} in Q
Q.push(v, v.d)
| version 1 의 time complexity 로 설명하면, $O(( | V | + | E | )log | V | )$ |
geeksforfeeks c++ python python hw
Dijkstra algorithm correctness 증명
proof by Induction 을 통해 증명하겠다.
loop invariant 는 매 iteration의 시작점에서 $u.d = \delta(s,u)$ 즉, shortest path distance
shortest path 가 결정된 vertex 집합을 $S$라 하고, 매 iteration 마다 정점 하나씩 추가된다.
base case: 시작점 source vertex의 shortest distance 는 0이므로 $s.d = \delta(s,s) = 0$ correct
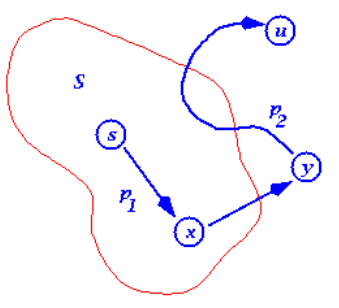
Induction step: 임의의 iteration 이전까지는 S안에 shortest path distance들이 결정된 vertex들만 들어가다가 dijkstra 알고리즘에의해 처음으로 $\color{red}u.d \neq \delta(s.u)$ 인 $\color{red}u$가 queue에서 뽑혔다고 하자.(모순을 이끌어내겠다.)
이때, $s$부터 $u$ 까지의 shortest path에서 $S$의 경계점 바로 직전과 직후의 정점 $x$와 $y$ 를 생각해 보자.
일단. $x.d = \delta(s,x)$ 가 자명하다($S$가 shortest path distance가 결정된 정점 집합이라고 했으므로)
그래서, $y.d = \delta(s,x) + w(x,y) = \delta(s,y)$ 는 shortest distance 인 상황이며,
이 사실과 negative edge가 없다는 사실로부터 ($\delta(y,u) \ge 0$) \(\begin{aligned} u.d &> \delta(s,u) = y.d + \delta(y,u)\ge y.d \\ \therefore u.d &> y.d \end{aligned}\) 임을 주목해보자.
이 상황에서, 우리의 처음 가정이 맞다면, $u.d \le y.d $이어야한다. ( dijkstra 알고리즘에의해 처음으로 $u.d \neq \delta(s.u)$ 인 u가 queue에서 뽑혔다고 했으므로 $u.d$가 같거나 더 작아야한다.)
하지만, 그렇지 않기 때문에 모순이 된다.
따라서, $\color{red}u.d = \delta(s,u)$ 인 $\color{red}u$가 뽑혀야만 한다.
All pair shortest path
Naive DP
$ l_{ij}^{(m)}$ node $i$ 부터 node $j$ 까지 가는데 최대 $m$ 개의 edge를 거쳐서 가는 path의 minimum weight
[intution]
이때, 총 노드의수 를 $n$ 이라하면, 거쳐가는 edge의 수 $m$이 $n-1$보다 많으면 반복되는 node가 존재한다는 뜻이므로 cycle이 있다는 뜻인데, negative edge가 없다고 가정했으므로 당연히 cycle을 돌면 shortest path의 wieght sum 보다 높은 path sum이 된다. 즉, $m = n - 1$ 까지 update하면 optimal solution이 됨
$ {min}{(l_{ij}^{(m-1)}, \underset{1 \le k \le n}{min}{(l_{ik}^{(m-1)} + w_{kj} )} )} = \underset{1 \le k \le n}{min}{(l_{ik}^{(m-1)} + w_{kj} )} ~~~~ \text{if } m \ge 1$
$\because k = j $ 이면 $w_{jj}=0$ 이 되므로 case가 합쳐질수 있다.
따라서, recursive formula 는 다음과 같다.
\(l_{ij}^{(m)} =
\begin{cases}
\underset{1 \le k \le n}{min}{(l_{ik}^{(m-1)} + w_{kj})} & \text{if } m \ge 1 \\
l_{ij}^{(0) } =
\begin{cases}
0 & \text{if } i = j\\
\infty & \text{if } i \neq j
\end{cases} & \text{if } m = 0 \\
\end{cases}\)
여기서 또 주목할 만한점은 $m=1 $ 일때는 $l_{ij}^{(1)} = w_{ij}$ 이므로 $l_{ij}^{(0)}$을 굳이 계산할 필요는 없다.
$O(n^4)$ 이 걸리는 아주 비싼 알고리즘이다. $ \because n^3$ entries, each entry takes $O(n)$
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
# update next step for m
update(L,W)
n = len(L)
let L`[1..n, 1..n] be a new array
for i = 1 to n
for j = 1 to n
L`[i,j] = INF
# each entry can be calculated in O(n)
for k = 1 to n
L`[i,j] = min(L`[i.j], L[i.j] + W[k,j])
return L`
# given a graph's weight matrix W[1..n, 1..n]
APSP(W)
n = len(W)
let L[1..n, 1..n] be a new array
# initialization
L = W
# update L for m
for m = 2 to n-1
L = update(L, W)
retrun L
$m$ 에 대해 linear 하게 update 하는 위의 방식을 조금 더 개선해보자.
L 의 계산이 associative한 성질을 가지며, $m \ge n - 1$이면 shortest path weight는 고정되어 L 은 바뀌지 않는다.
따라서, associative 하게 $k$번 계산하여 $2^k \ge n-1$ 일 경우 optimal sol으로 고정된다.
따라서, optimal sol에 도달하기 까지$k = O(logn)$ 번 연산하게 됨.
\(\begin{aligned}
L^{(1)} &= W \\
L^{(2)} &= W^2 = WW \\
L^{(4)} &= W^4 = W^2W^2\\
... \\
L^{(2^k)} &= W^{2^k} = W^kW^k\\
L^{(2^k \ge~ n-1)} &= W^{2^k \ge ~ n-1} (fixed)\\
\end{aligned}\)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
# given a graph's weight matrix W[1..n, 1..n]
faster_APSP(W)
n = len(W)
let L[1..n, 1..n] be a new array
# initialization
L = W
# update L for m
for m = 2 < n-1
L = update(L, L)
m = m*2
retrun L
$O(n^3logn)$ 으로 계선되었지만 여전히 비싼 알고리즘이다.
Floyd Warshall Algorithm
All pair shortest path with DP 를 조금더 효율적으로 해보자는 접근
기본 가정: no negative cycle
먼저 주어진 그래프에 대한 edge정보로 부터 matrix $C$ 정의 \(C_{ij} = \left \{ \begin{matrix} 0 & \text{if } i=j \\ c(i,j) \ge 0 & \text{if } i \ne j, (i,j) \in E \\ \infty & \text{if } i \ne j, (i,j) \notin E \\ \end{matrix}\right.\) $d_{ij}^{(k)}$: $v_i \text{~} v_j$ 까지 가는데 $v_1, .., v_k$를 거쳐가는지에 대한 유무가 update된 shortest path distance ($k$ 가 증가함에따라 점점 더 많은 노드정보를 거쳐가는것에 대한 정보를 업데이트 된다).
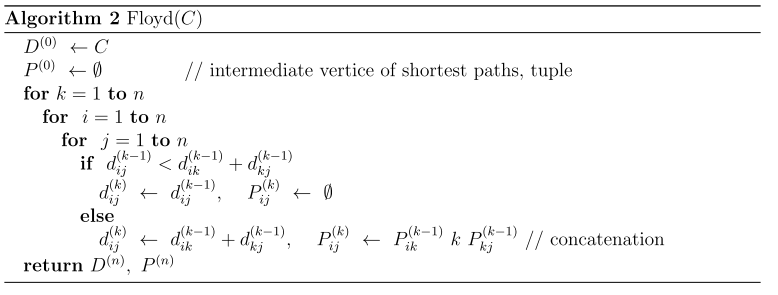
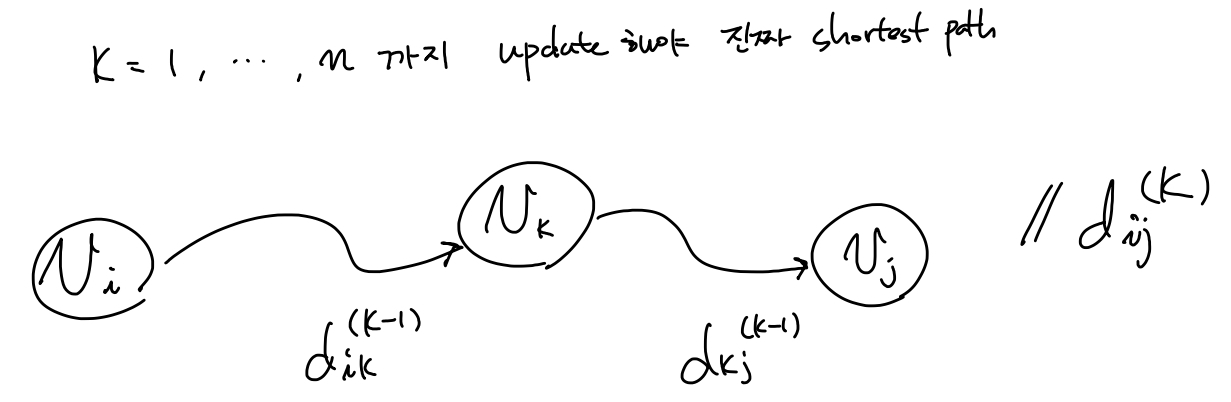 \(d_{ij}^{(k)} = \left \{
\begin{matrix}
c(i,j) \ge 0 & \text{if } k=0 \\
min \{ d_{ij}^{(k-1)}, d_{ik}^{(k-1)} + d_{kj}^{(k-1)} \} & \text{if } k \ge 1 \\
\end{matrix} \right.\)
Time complexity: $O(n^3)$ because all entry $(1\le i,j,k\le n)$ , is $n^3$, each entry takes $O(n)$ time
\(d_{ij}^{(k)} = \left \{
\begin{matrix}
c(i,j) \ge 0 & \text{if } k=0 \\
min \{ d_{ij}^{(k-1)}, d_{ik}^{(k-1)} + d_{kj}^{(k-1)} \} & \text{if } k \ge 1 \\
\end{matrix} \right.\)
Time complexity: $O(n^3)$ because all entry $(1\le i,j,k\le n)$ , is $n^3$, each entry takes $O(n)$ time
back propagation: $P^{(k)}$의 각 entry $P_{ij}^{(k)}$가 의미하는것은 현재까지 업데이트된 $v_k$ 를 지나는 $v_i \rightsquigarrow v_k \rightsquigarrow v_j$ 의 shortest path 정보를 의미한다. ($k = 1,..,n$ 까지 모두 update되어야 진짜 shortest path가 됨)
Johnson
Dijkstra 와 BallmanFord를 이용한 알고리즘
MST
MST(Minimum Spanning Tree) 를 구하는 것
기본 용어 설명
light edge: 어떤 정점 집합을 둘로 나누는 cut을 했을때, crossing edge 중에 weight가 가장 작은 edge
safe 하다: weight의 sum 이 minimum을 갖는 spanning tree에 대해서 어떤 edge $(u,v)$ 를 더해도 그 특성이 유지 된다면 safe 하다고 한다.
일반적인 MST 알고리즘은 다음과 같다
1
2
3
4
5
6
MST(G)
create set A
while A does not form a spanning tree
find an edge (u,v) that is safe for A
A = A union {(u,v)}
return A
Kruskal
greedy method 을 이용하여 네트워크(가중치를 간선에 할당한 undirected 그래프)의 모든 정점을 최소 비용(최소 경로)으로 연결하는 최적 해답을 구하는 것
disjoint set 자료구조를 활용하며, greedy 하게 light edge 를 추가하면 safe함을 이용함
방법: disjoint set 자료구조를 활용하여 independent 한 tree들을 만들고, 작은 weight를 가진 edge 순서대로 crossing하는 edge에 대해서 tree들을 merge해 나간다. 즉, safe 할때, merge한다.
disjoint set에 2 가지 heuritic 이 사용된다.
- path compression
- union by rank
이 2가지의 heuristic을 사용하면, n 개의 disjoint set이 있을때(n 번의 makeset operation 이 수행된 상태),
makeset, findset,union operation이 모두 m 번 call 된다고하면,
전체 operation을 수행하는데 $O(m\alpha(n))$만큼의 시간이 걸린다.
여기서, $\alpha(n)$ 은 $logn$ 에 upper bounded 되어있어서 효율적인 operation 수행이 된다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
DisjointSet
__init__(n)
let parent[1..n] be a new array
let rank[1..n] be a new array
# DisjointSet을 만드는 순간 n 번의 makeset operation
for i=1 to n
rank[i] = 0
parent[i] = i
findset(u)
# path compression(한번 representative를 찾을때 이어놓는다)
if u != parent[u]
parent[u] = findset(parent[u])
retun parent[u]
union(x, y)
# find each representative for the set that includes x and y
x = findset(x)
y = findset(y)
# union by rank(rank가 작은 disjoint set을 큰쪽에 연결)
# y 의 rank 가 x 보다 같거나 크면, y를 x.p 로 한다.
# (rank가 같을때는 y에 연결후, y rank만 1증가)
if rank[x] > rank[y]
parent[y] = x
else
parent[x] = y
if rank[x] == rank[y]
rank[y] = rank[y] + 1
kruskal(G)
# weight sum
sum = 0;
# initialization
create DisjointSet Ds;
# makeset for all v in G.V : O(V)
Ds ← all v in G.V
create a empty MST set A
# preprocessing
# sort G.E by (weight)increasing order : O(ElogE)
sort(G.E);
# 서로 다른 distinct component를 crossing하는 edge 중에서
# weight가 가장 작은 light edge를 greedy 하게 찾는과정(DisjointSet 이용)
# O((V+E)α(V)) 여기서 α(V) upper bounded by O(logV)
for (u,v) in G.E
if Ds.findset(u) != Ds.findset(v)
# (u,v) edge is a greedy choice
# update the sum of MST weight
sum = sum + w(u,v);
Ds.union(u, v);
A = A union {(u,v)}
return sum;
| kruskcal 알고리즘이 전체과정에서 makeset $O( | V | )$, findset $O( | E | )$, union $O( | V | )$ 번 call 되므로 |
| kruskcal 알고리즘에서 for문에서 쓰인 disjoint set의 operation 수는 $ | V | + | E | $ 번이므로 |
| time complexity는 $O(( | V | + | E | )\alpha( | V | )$ 인데, |
$\alpha(n)$ 은 $logn$ 에 upper bounded 되어 있고,
| graph G가 connected 되어있다면, $ | E | \ge | V | -1 $ 이고, |
graph G가 sparse 하다면 $|E| > |V|^2$ 이므로,
\(\begin{aligned}
T(n)
&= O((V|+|E|)\alpha(|V|)) \\
&\le O(|E|\alpha(|V|)) \\
&\le O(|E|log|V|) \\
&\le O(|E|log|E|) \\
&\le O(|E|log|V|^2) = O(|E|log|V|)
\end{aligned}\)
Prim
root note $r$ 을 주면 undirected graph $G$에서 priority queue를 이용하여 모든 vertex중에서 근접한 edge의 weight를 업데이트 해나가면서 light edge 를 찾아 MST를 찾는다. 즉, safe한 edge를 더해나간다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
prim(G, r)
# MST에서 predecessor vertex를 저장하고, 업데이트 할 array
let parent[1..|G.V|] be a new array
# initialization
u.d = INF for all u in G.V except for k == r
r.d = 0
parent[u] = Nan for all u in G.V
# priority queue Q(min heap by value)의 {key=vertex, value=vertex.d}
create priority queue Q
Q ← all G.V
while !Q.empty()
u = Q.pop()
for v in G.adj[u]
# light edge가 발견되면 v의 value를 update하고, Q에도 반영
if v in Q and w(u,v) < v.d
v.d = w(u,v)
parent[v] = u
# update distance of v in O(log|V|)
Q.update_value(v, v.d)
light edge를 발견하면 Q 에서 나오고 더이상 parent와 d 가 업데이트 되지 않고, 그에 해당하는 edge가 MST가 됨을 주목하자!
따라서, Q에서 모든 vertex를 꺼내면 MST가 찾아지는데
이 알고리즘에 binary heap을 사용했을때, Q.pop()이나 Q.update_value() 연산이 $logV$ 만큼 걸림을 우린 알고있다.
그래서 알고리즘 내부의 수행 시간을 생각해보면,
1
2
3
4
5
6
7
8
9
# O(VlogV)
while !Q.empty()
u = Q.pop()
# adjacent list를 썻다면 O(ElogV)
# 왜냐하면 모든 edge를 돌게 되고, update_vale가 O(logV)
while !Q.empty()
u = Q.pop()
for v in G.adj[u]
| 따라서, $T(n) = O((V+E)logV) = O(ElogV)$ $\because $ graph G가 connected1 되어있다면, $ | E | \ge | V | -1 $ 이므로 |
Prim algorithm correctness 증명
proof by induction, or mathmatical induction을 이용 하여 증명하겠다!
loop invariant 는 매 iteration의 시작점에서의 tree 는 MST 의 subtree
base case: 처음 시작할때 tree는 아무 노드도 없으니까 당연 optimal
induction step: k번째로 edge를 추가하려는 상황 지금까지의 알고리즘에 의한 tree는 optimal이라 가정
$T^{(k)}$는 MST $T^*$의 subgraph 인 상황
알고리즘 동작대로 해보고 다음 iteration 시작하기전 $T^{(k+1)}$ 역시 $T^* $의 subgraph인지 확인하겠다.
만약 알고리즘에 의해 어떤 edge $e = (u,v)$ 를 추가하는데 $e$가 $T^* $의 edge가 아니라고 가정! (모순을 찾겠다)
일단, $T^* \cup e$ 는 사이클이 반드시 생긴다. ($T^*$는 minimums panning tree2인데 edge를 추가했으니까 )
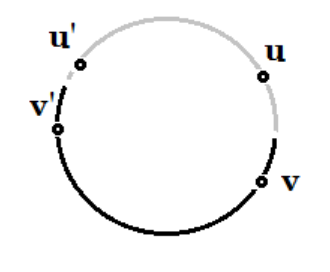
이 사이클 안에서 $u’$은 $T^{(k)}$ 안에 있고, $v’$ 은 $T^{(k)}$ 밖에 있는 $e$와 다른 어떤 한 edge $e’=(u’,v’)$ 을 고르자
(회색선은 $T^{(k)}$ 의미)
그때 prim 알고리즘에서는 weight가 작은 edge를 선택하므로 $e$를 선택 했다면 $ w(e) \le w(e’)$ 인 상황이다.
$T ‘ = T^* - e’ + e$ 라고하면,
| $ | T’ | \le | T^* | $ 가 되므로 $T^* $는 optimal 이 아닌 모순적 상황이다. |
따라서, 매 iteration 마다 prim 알고리즘에 의해 추가되는 $e$는 MST $T^*$ 에 포함된 edge이다.
Flow Maximization
flow network (2018_2 APM hw3 참조)
(1) flow network definition: 그래프에는 src, sink node가 있고, edge가 있으면 nonnegative capacity 를 갖고, edge가 없으면 capacity가 0 이됨.
flow definition: capacity $c$ , src, sink 노드 $s, t$ 를가진 flow network $G = (V,E)$ 에 대해서 edge $E$ 를 어떤 실수값 $ \R $ 로 mapping 시켜주는 함수 인데, 2가지 성질을 갖는다.
-
Capacity constraint: $ 0 \le f(u,v) \le c(u,v) $ ,$\forall (u,v) \in E $
flow 값이 제한됨
-
Flow conservation: $\sum_{(u,v)\in E}{f(u,v)} = \sum_{(v,w)\in E}{f(v,w)} $ ,$\forall v \in V - {s,t} $
src, sink 를 제외한 노드 $v$에 들어온 flow 양과 나가는 flow 양이 같다.
**(2) flow maximization problem definition: **Given a flow network G with source s and sink t , find a flow of maximum value from s to t
**LP formula: **$Maximize$ $\sum_{v\in V}{f(s,v)}$ $s.t$ Capacity Constarint, Flow conservation
이때, capacity 는 주어진 graph의 weights $c(u, v) = w(u,v)$
이 문제는 residual network와 augmenting path 라는 개념을 통해
Ford Fulkerson algorithm에 의해 풀릴 수 있다.
Ford Fulkerson
이 알고리즘을 설명하기전에 먼저, residual network $G_f$ 와 augmenting path의 개념을 알아야한다.
Definition of $G_f$: 주어진 flow network $G$ 와 동일한 정점과 간선을 갖는다. 그리고,
residual capacity 정의는 다음과 같다.
(주의사항: edge가 $(u,v),(v,u)$ 둘다 있을때는 $c_f(u,v) = c(u,v) - f(u,v) + f(v,u)$ ) \(c_f(u,v) = \left \{ \begin{matrix} c(u,v) - f(u,v) & \text{if } (u,v) \in E \\ f(v,u) & \text{if } (v,u) \in E \\ 0 & \text{o.w } \\ \end{matrix} \right.\)
augmenting path는 src $s$ 에서 sink $t$ 까지 모든 residual capacity가 0 이상인 simple path를 말한다.
$G_f$ 는 augmentation 연산이 superposition으로 계산될 수 있는 특성을 가진다. ($G_f$는 flow $f$에 의해 생성된 residual network 이고, $f’$ 은 $G_f$의 또 다른 flow. 따라서, flow는 포화 될때 까지 계속 augmented될 수있다.)
$f \uparrow f $ $= f + f’ $ augmentation 연산을 다음과 같다. \(f \uparrow f' (u,v) = \left \{ \begin{matrix} f(u,v) + f'(u,v) - f'(v,u) & \text{if } (u,v) \in E \\ 0 &\text{o.w} \\ \end{matrix}\right.\)
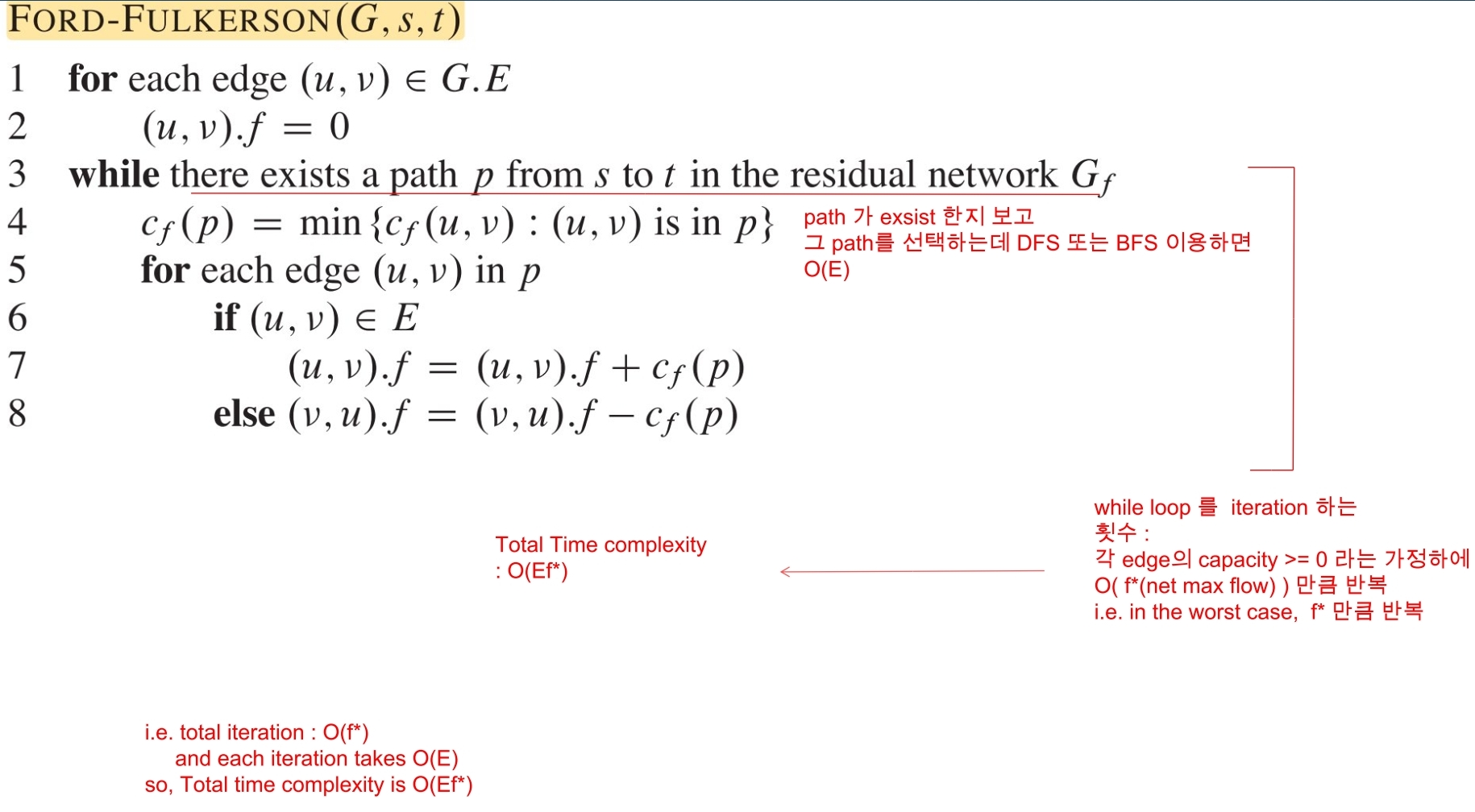
먼저, Ford-Fulkerson 방식에 대한 pseudo code
| Time complexity: $O( | E | f^)$ , $f^$ 은 flow를 업데이트 한 총 횟수 (운이 나쁘면 매우 오래걸릴 수 있다.) |
Edmonds-Karp algorithm
(Ford-Fulkerson 방법의 한가지 구현 방법)
이제, 본론으로 돌아와서 Edmonds-Karp algorithm의 기본 idea는 다음과 같다.
$G_f$ 에서 $s \rightarrow t$ 로 가는 path를 찾을 때, 모든 edge들의 weight를 1로 한(unit distance로 본) BFS 알고리즘 을 이용함. DFS, BFS c++
이때 주목해야 할 intuition은 각 iteration 마다 찾아진 augmenting path 중에 적어도 한개의 edge는 saturated($c_f(e) = 0$) 되며 (왜냐하면 flow가 update 될때, $G_f$ 의 residual capacity값이 바뀌게 되는데 그에 따라 BFS 하는 방향 이 계속 바뀜 ), 점점 augmenting path의 길이는 길어진다. 이때, 증가되는 augmenting path의 최대 길이는 $V$ $-1$이기 때문에 모든 iteration에서 flow가 증가한 수$ f^* $는 $O( V E )$ 로 bounded 된다.
pseudo code ref
Edmonds($G, s, t$)
$G_f \leftarrow G$
for each edge $(u,v)$ in $G.E$
$(u,v).f$ = 0
# iteration
while $\exist ~ p$ from $s$ to $t$ using $BFS(G_f)$
$c_f(p) = min { c_f(u, v): (u,v) ~ in ~ p}$
# aumentations
for each edge $(u,v)$ in $p$
if $(u,v) \in G.E$
$(u.v).f = (u,v).f + c_f(p)$
else
$(u.v).f = (u,v).f - c_f(p)$
| time complexity: $O( | V | E | ^2 )$ 왜냐하면, BFS 하는데 $O( | E | )$, 총 flow augmented 수 $O( | V | E | )$ |
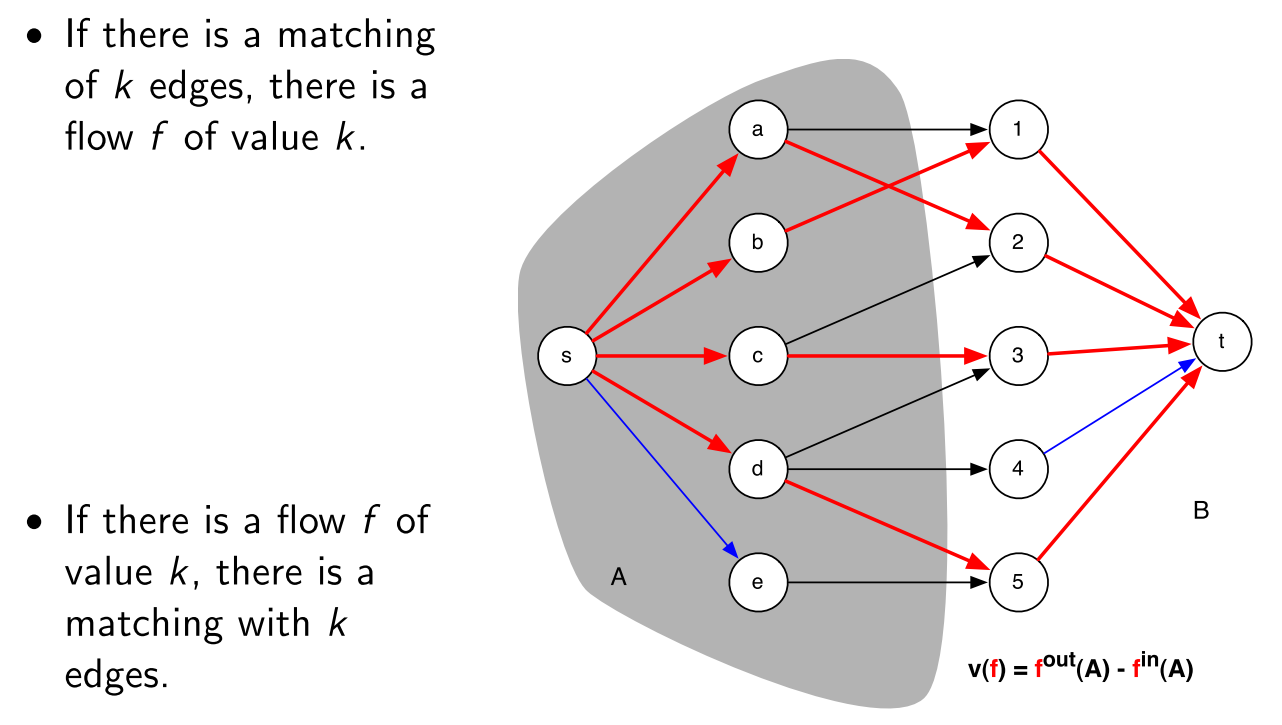
Maximum Bipartite Matching
bipartite그래프에서 최대한 많은 수의 matching3을 찾는 문제
이 문제는 Flow Maximization를 푸는 것을 이용할 수있다.
max matching size = total net flow 를 이용한다.
1
2
3
4
5
6
1 Given bipartite graph G
2 Add new vertices s and t.
3 Add an edge from s to every vertex in L.
4 Add an edge from every vertex in R to t.
5 Make all the capacities 1.
6 Solve maximum network flow problem on this new graph G'
Min Cut
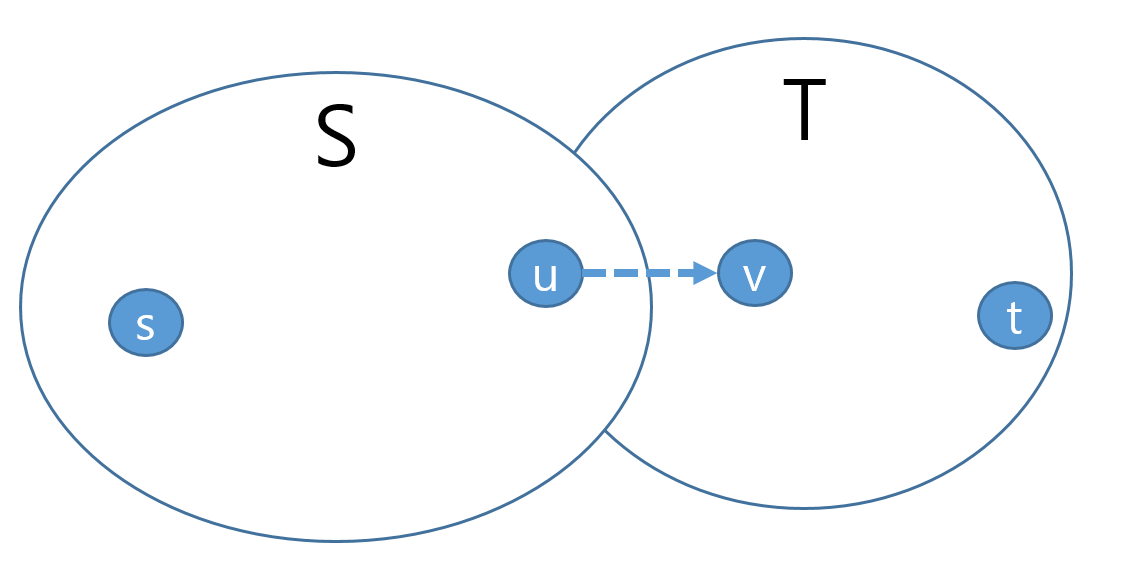
ST-Min Cut 문제는 directed edge weighted graph $G$의 vertex set $V$를 2개의 set $S, T$로 나누는데 $S$는 $s$를 포함한 집합, $T$는 $t$를 포함한 집합이다. 이때, $S$와 $T$를 crossing하는 edge weight를 최소화 하고 싶은게 이 문제이다.
Given an directed (edge weighted) graph $G=(V,E)$, with a source vertex $s$ and a sink vertex $t$, compute a st-cut ($S,T$) so that the sum of the crossing edge weights is the minimum.
이 문제는 Flow Maximization를 푸는 것을 이용할 수있다.
max-flow min-cut theorem (three conditions are equivalent)
-
$f$ is a maximum flow in $G$. (flow maximization problem solution)
-
The residual network $G_f$ contains no augmenting paths. (terminate condition of flow maximization)
-
$ f = c(S, T)$ for some st-cut $(S, T)$ of $G$. (mincut problem solution) $ c(S, T) = \sum_{u \in S} \sum_{v \in T}{c(u,v)}$ ,여기서 $c(u,v)$ 는 residual capacity of $(u,v)$
Proof. We will prove 3 $\Rightarrow$ 1, 1 $\Rightarrow$ 2, 2 $\Rightarrow$ 3
(3 $\Rightarrow$ 1) From the capacity constraint, any flow f and any st-cut $(S’, T’)$, we have that $|f| ≤ c(S’, T’).$ \(\begin{aligned} \mbox{total net flow } |f| &= \sum_{u\in S'}\sum_{v\in T'}{f(u,v)} - \sum_{v\in S'}\sum_{u\in T'}{f(v,u)} \\ &\le \sum_{u\in S'}\sum_{v\in T'}{f(u,v)} &\because |f| \ge 0 \\ &\le \sum_{u\in S'}\sum_{v\in T'}{c(u,v)} &\because f(u,v) \le c(u,v)\\ &= c(S',T') \end{aligned}\)
| From this inequality, $ | f | =c(S’, T’)$ implies $f$ is max flow. Thus, we have that 3 $\Rightarrow$ 1. |
(1 $\Rightarrow$ 2) 모순을 이끌어 내기 위한 가정으로 1은 True인데, 2는 False라고 가정해보자.
즉, $f$ 는 $G$의 max flow인데, $G_f$ 는 augmenting path $f’$를 가진하고 하자.
| 그러면, $G_f$의 augmenting path $f’$을 더 함으로서 $ | f+f’ | = | f | + | f’ | $ property에 의해 $f$를 증가시킬 수 있다. |
이 상황에서, 우리는 1 이 False($f$는 더이상 max flow가 아님)가 된다.
따라서, 모순이므로, 1이 True면 2는 반드시 True여야한다.
(2 $\Rightarrow$ 3) Let $S$ to be the set of vertices in $G$ that is reachable from $s$ by a path with positive edge capacities (of $G_f$), and let $T = V − S$.
| 2가 True이면 augmenting path가 더이상 없으므로 T에 속한 v 에 절대 reachable 할수 없다. 그래서, $ | f | = c(S,T)$ (3 도 True)라고 할 수 있다. |
만약 2가 True가 아니라면, augmenting path가 있다는 것이고, 그말은 즉슨, residual capacity 보다 작은 flow f(u,v) 가 존재한다는 뜻( $\exist f(u,v) < c(u,v)$)이여서 $u$에서 $v$로 갈수 있는 augmenting path가 존재하게 되어 T에 속한 v 에 reachable 할수있게 된다. 즉,2가 False 가 되는 모순이 되므로 반드시 2가 True인 상태에서 3 이 True 가 된다.
Max Cut
Efficient algorithm: Goemans and Williamson (Approximate algorithm)
Approximate algorithm에서 다루도록 하겠다.

Leave a comment