In [1]:
PCA
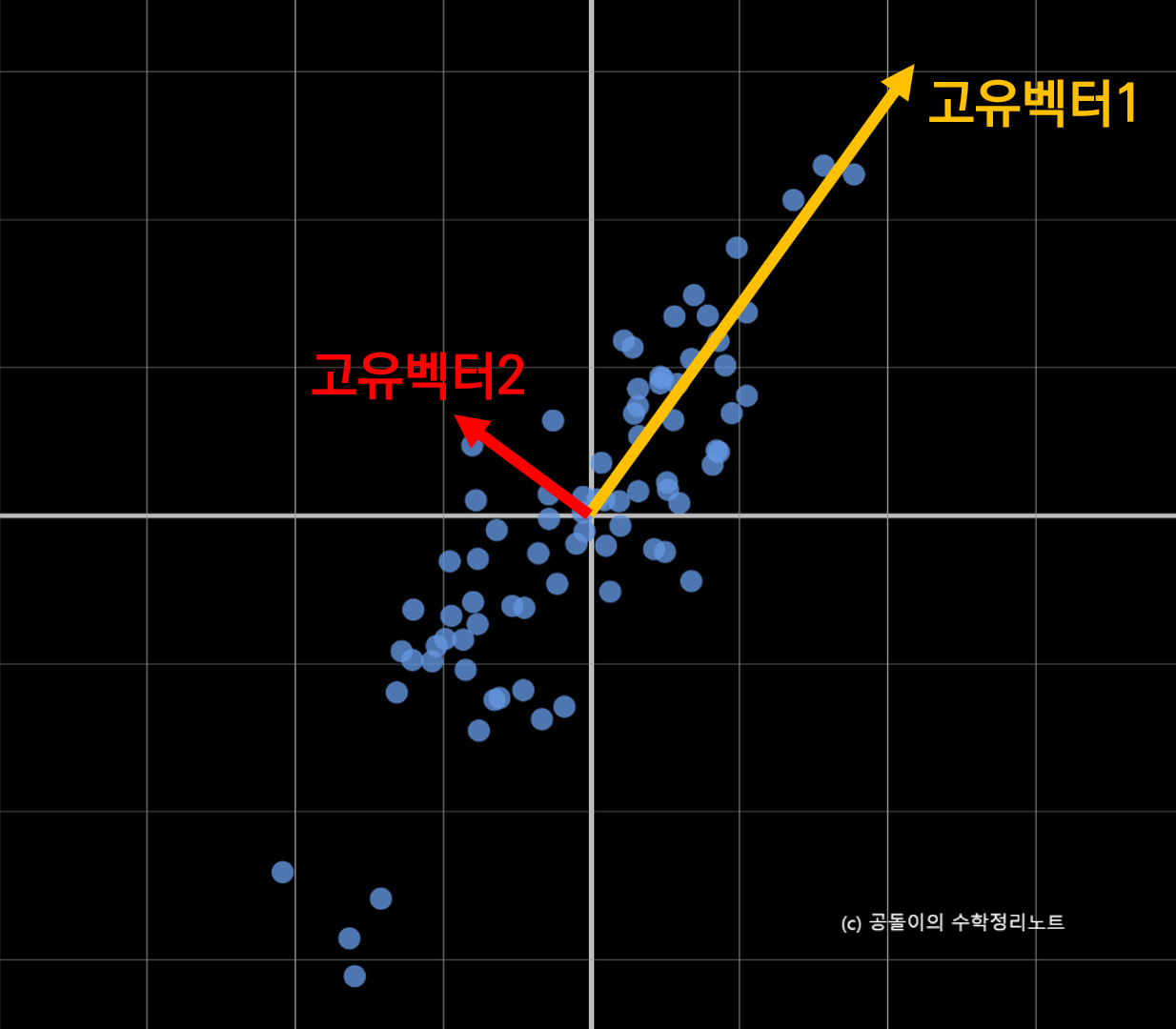
PCA의 목적은 한마디로 말하면, 고차원의 원본 데이터를 저차원으로 압축하고 싶은데,
데이터의 분산(데이터의 특성)을 최대한 보존하여 낮추고자 할때 사용하는 방법이다.
좀 더 구체적으로 말하면, 데이터의 분산 특성인 공분산행렬로 데이터분포를 가장 설명할 수있는 eigen vector와 eigen value들을 찾는 것이 가능하다.
데이터 행렬 에 대한 covariance(공분산행렬)이 데이터의 분산 특성을 나타내는 행렬인데, 이 공분산행렬을 선형대수적 특성을 이용하여 데이터의 분포를 가장 잘 표현하는 $n$개(데이터의 차원 수)의 eigen vector와 eign value로 표현 할 수 있다.
그런데, 데이터의 분산 특성을 가장 잘 드러내는 (eigen value가 가장 큰) $k$개의 eigen vector들을 골라($k$ 개의 principal axis) $n$개의 bases으로 표현할 수 있는 $n$차원 안의 모든 데이터를 $k$ 개의 bases를 이루는 $k$ 차원의 데이터 공간으로 Projection 함으로써 압축한다.
eigen vector의 의미는 어떤 matrix $\mathbf{A}$ 를 통해 vector $\mathbf{x}$ 를 linear transform 했을때, 방향은 변하지 않고, 크기만 변하는 벡터를 의미한다. 이때 변하는 크기가 eigen value를 의미한다.
다음 그림은 이해를 돕기위해 $\mathbf{A}\mathbf{x} = \mathbf{b}$, where $\mathbf{A} \in \mathbb{R}^{m \times n}$에서의 space정보들이다.
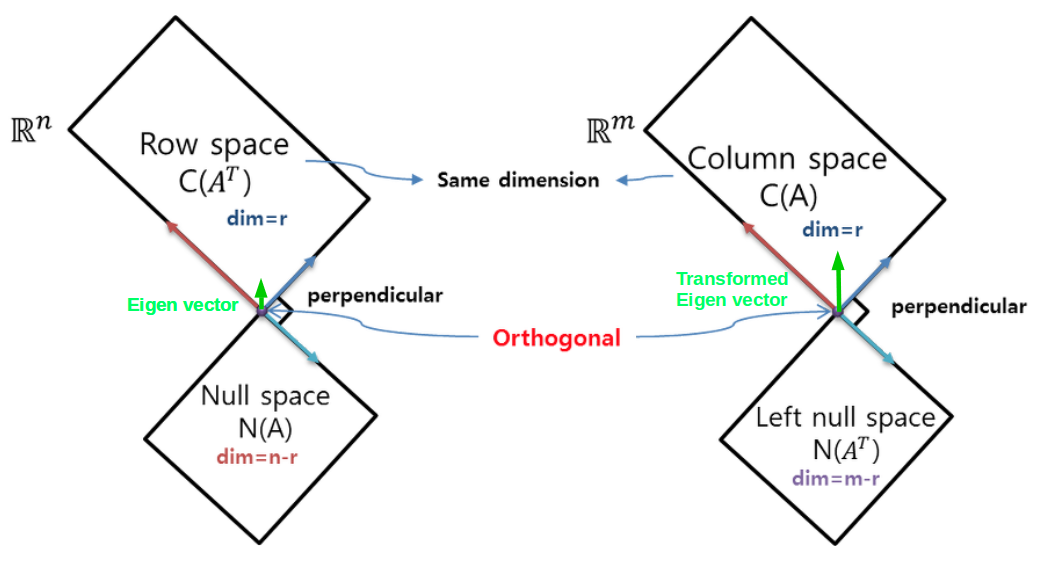
eigen vector $\mathbf{e}$는 $\mathbf{A}\mathbf{e}$와 같이 linear transform 되어도,
크기만 변하는 $\mathbf{A} \mathbf{e} = \lambda \mathbf{e}$ 와 같은 특성을 지닌다.
따라서, 위의 그림에서 column space의 한 vector인 $\mathbf{e}$는 row space의 $\mathbf{A} \mathbf{e}$로 transform되어도 방향이 그대로 보존 된다.
Proof
정말로 $n$ 차원의 데이터를 $k$개의 eigen vector들을 골라 압축하는게 최선으로 데이터의 (분산) 특성을 보존하는 것일까? 수학적으로 증명해보자.
| name |
<div style="width:290px">notation</div> |
dimension |
| data matrix |
$\mathbf{X}$ |
$\mathbb{R}^{m \times n}$ |
| eigen vectors |
$\mathbf{E} = [\mathbf{e}_1, \mathbf{e}_2, …, \mathbf{e}_k]$ |
$\mathbb{R}^{n \times k}$ |
| eigen values |
$\boldsymbol{\lambda}_{[k \times k]} = \begin{bmatrix} \lambda_1 & 0 & … & 0 \\0 & \lambda_2 & … & 0 \\0 & 0 & … & 0 \\… & … & … & … \\0 & 0 & … & \lambda_k \\ \end{bmatrix}$ |
$\mathbb{R}^{k \times k}$ |
일단, $n$ 차원의 $m$ 개의 데이터들 들을 $k$차원으로 압축했다고 생각하자.
그러면, $n$ 차원에서 $k$차원으로 Projection 하는 $\mathbf{V} \in \mathbb{R}^{n \times k} = [\mathbf{v}_1, \mathbf{v}_1, …, \mathbf{v}_k]$를 생각할 수 있다.
(여기서, $\Vert \mathbf{v}_i \Vert = 1, \forall i$ 이다.)
편의상 $\mathbb{E}(\mathbf{X}) = 0$으로 가정한 상황에서
원본 데이터의 covariance 를 보존한다는 것은
Projection 된 $\mathbf{X} \mathbf{V} \in \mathbb{R}^{m \times k}$의 covariance 인 $cov(\mathbf{X}\mathbf{V}) \in \mathbb{R}^{k \times k}$를 최대화하는 말과 같다.
따라서, 정리하면 문제는 다음과 같다.
\[\begin{align}
\text{maximize } cov(\mathbf{X}\mathbf{V})& \\
cov(\mathbf{X}\mathbf{V}) &=\frac{1}{m - 1}(\mathbf{X}\mathbf{V})^T (\mathbf{X}\mathbf{V})\\
&= \mathbf{V}^T (\frac{\mathbf{X}^T \mathbf{X}}{m - 1}) \mathbf{V} \\
&= \mathbf{V}^T \Sigma \mathbf{V}
\end{align}\]
이 문제에서 $cov(\mathbf{X}\mathbf{V})$는 $\Vert \mathbf{V} \Vert$가 클수록 값이 크므로 제약사항으로 다음과 같은 조건이 추가된다.
\(\Vert \mathbf{V} \Vert = 1\)
제약사항들(constraints)이 있는 최소/최대 문제를 풀때 사용하는 Lagrange Multiplier Method(라그랑주 승수법)을 이용하면 문제는 다음과 같이 풀린다.
\(\begin{align}
L &= \mathbf{V}^T \Sigma \mathbf{V} - \boldsymbol{\lambda}_{[k\times k]}(\Vert \mathbf{V} \Vert - 1)\\
\frac{\partial L}{\partial V} &= 2\Sigma \mathbf{V} - 2 \boldsymbol{\lambda}{[k\times k]} \mathbf{V} = 0 \\
\Sigma \mathbf{V} &= \boldsymbol{\lambda}_{[k \times k]} \mathbf{V}
\end{align}\)
위의 조건(eigen vector의 정의)을 만족하는 $\mathbf{V}$는 $k$개의 eigen vectors이며, $\lambda_i \forall i$값들은 eignen value가 됨을 알 수 있다.
\(\therefore \mathbf{V} = \mathbf{E}\)
또한, $\lambda_i$ 가 클수록 $\mathbf{X} \mathbf{e_i}$ 가 크기 때문에, top $k$ 개의 $\lambda_{1, 2, …, k}$ 를 선택하고, 이에 대응되는 $\mathbf{e}_{1, 2, …, k}$를 선택하면 된다.
최종적으로 $\mathbf{e}_{1, 2, …, k}$ 가 span 하는 공간으로 데이터 샘플들을 Projection 하는 것이 원본 분산을 최대로 보존하는 방법이 된다.
Step 1. Centering
feature, 즉 변수(행)별로 평균을 $0$으로 centering한 행렬 $X$를 만듬
(좌표계의 원점이 평균 벡터와 일치하도록 만듬)
$m$: the number of data(sample)
$n$: the dimension of each datagen value를 의미한다.
In [2]:
1
2
3
4
5
6
7
| * 원본 data
[[5. 2. 8.]
[8. 3. 2.]
[1. 3. 6.]
[7. 3. 3.]
[4. 1. 2.]]
|
In [3]:
1
2
3
4
5
6
7
| * 각 feature 별 평균: [5. 2.4 4.2]
[[ 0. -0.4 3.8]
[ 3. 0.6 -2.2]
[-4. 0.6 1.8]
[ 2. 0.6 -1.2]
[-1. -1.4 -2.2]]
|
In [4]:
1
2
3
| array([[ 7.5 , 0.5 , -3.5 ],
[ 0.5 , 0.8 , 0.15],
[-3.5 , 0.15, 7.2 ]])
|
Step 2. Find Covariance Matrix
공분산행렬은 다음 식으로 만들 수 있음, 여기서 $m - 1$로 나눈 이유는 $m$개의 데이터로 이루어진 샘플인 표본 분산에 대한 공분산 행렬이기 때문이다.
($m - 1$ degree of freedom, 왜냐하면 마지막 하나의 데이터는 모평균으로 맞추기 위해)
\(\Sigma = cov(X)= \frac{X^T X} {m − 1} \propto X^T X\)
In [5]:
1
2
3
4
| [[ 7.5 0.5 -3.5 ]
[ 0.5 0.8 0.15]
[-3.5 0.15 7.2 ]]
|
Step 3. Find Eigen Values and Vectors
공분산행렬(C)을 기반으로 고유값(l)과 고유벡터(principal_axes) 구하기
In [6]:
1
2
3
4
5
| [10.86 3.913 0.727]
[[ 0.723 0.681 -0.118]
[ 0.026 0.144 0.989]
[-0.69 0.718 -0.087]]
|
고유값을 높은 순으로 정렬하고, 이에 대응하는 고유벡터와 순서를 맞춤
In [7]:
In [8]:
1
2
3
4
5
| [10.86 3.913 0.727]
[[ 0.723 0.681 -0.118]
[ 0.026 0.144 0.989]
[-0.69 0.718 -0.087]]
|
In [9]:
Step 4. Dimensionality Reduction
차원축소 예 (고유값을 기준으로 가장 큰 $k$개의 고유 벡터 선택)
- principal axis(principal_compoents) 를 구함
In [10]:
1
2
3
4
| [[ 0.723 0.681]
[ 0.026 0.144]
[-0.69 0.718]]
|
- principal axis 를 기반으로 원본데이터 $X$에 대한 principal components 를 구함
그리고 top 2 개의 components 들에 대해서 dimensionality reduction을 수행
In [11]:
1
2
3
4
5
6
| [[-2.634 2.672 -0.725]
[ 3.703 0.548 0.431]
[-4.119 -1.344 0.909]
[ 2.29 0.586 0.462]
[ 0.76 -2.462 -1.077]]
|
In [12]:
1
2
3
4
5
6
| [[-2.634 2.672]
[ 3.703 0.548]
[-4.119 -1.344]
[ 2.29 0.586]
[ 0.76 -2.462]]
|
In [13]:
1
2
3
| [-2.634 3.703 -4.119 2.29 0.76 ]
[ 2.672 0.548 -1.344 0.586 -2.462]
|
Example 2
In [14]:
1
2
3
4
5
| [[ 0. -2.]
[ 3. -3.]
[ 2. 0.]
[-1. 1.]]
|
In [15]:
1
2
3
4
5
| [[-1. -1.]
[ 2. -2.]
[ 1. 1.]
[-2. 2.]]
|
Covariance Matrix C(or $\Sigma$) can be computed by $\frac{X^TX}{m - 1}$
In [16]:
1
2
3
| [[ 3.333 -2. ]
[-2. 3.333]]
|
In [17]:
1
2
3
| [[ 3.333 -2. ]
[-2. 3.333]]
|
In [18]:
1
2
3
4
| [5.333 1.333]
[[ 0.707 0.707]
[-0.707 0.707]]
|
In [19]:
1
2
3
4
| [5.333 1.333]
[[ 0.707 0.707]
[-0.707 0.707]]
|
In [20]:
1
2
3
4
5
| [[-2.220e-16 -1.414e+00]
[ 2.828e+00 -4.441e-16]
[ 2.220e-16 1.414e+00]
[-2.828e+00 4.441e-16]]
|
SVD

SVD(Sigular Value Decomposition) means that
$A$ can be decomposed by $U \in \mathbb{R}^{m \times k}, \Sigma \in \mathbb{R}^{k \times k}, V \in \mathbb{R}^{n \times k}$ mathmatically, where $k \le d $.
\(\begin{align}
A &= U \Sigma V^T \\
&=
\begin{pmatrix}
\mid & \mid & {} & \mid \\\\
\vec u_1 & \vec u_2 &\cdots &\vec u_k \\\\
\mid & \mid & {} & \mid
\end{pmatrix}
\begin{pmatrix}
\sigma_1 & & & \\
& \sigma_2 & & \\
& & \ddots & \\
& & & \sigma_k
\end{pmatrix}
\begin{pmatrix}
ㅡ & \vec v^T_1 & ㅡ \\
ㅡ & \vec v^T_2 & ㅡ \\
&\vdots& \\
ㅡ & \vec v^T_k & ㅡ
\end{pmatrix} \\
&= \sigma_1 \vec u_1 \vec v_1^T + \sigma_2 \vec u_2 \vec v_2^T +\cdots+ \sigma_k \vec u_k \vec v_k^T \text{, where } -1 \le \vec{u}_i \vec{v}_i^T \le 1
\end{align}\)
이로써 알 수 있는 점은 $\mathbf{A}$의 원소 값들은 $\vec{u}_i \vec{v}_i^T$ 의 linear combination 에 의해 결정되며 $ \alpha_i$ 에 의해 크기가 결정된다는 점이다.
$AA^T$ 또는 $A^TA$ 은 real symmetric matrix이며 다음과 같은 특성들을 지닌다.
한글 정리된 블로그 1 블로그 2
- symmetric 이므로 모든 eigen value 모두 실수(특히 양수).
- real symmetrix 이므로 positive definite. $\therefore \forall \lambda >0 $
- 모든 eigen vector가 1차 독립(full rank)이므로 대각화가 가능.
- 특히 eigen vector들이 서로 orthogonal 하므로 orthogonally diagonalizable(직교대각화가 가능)하다.
정리하면 다음과 같다.
직교행렬 $\mathbf{Z}$ 는 $\mathbf{Z} \mathbf{Z}^T = \mathbf{I}$ 를 만족 $\because \mathbf{Z}^T = \mathbf{Z}^{-1}$
- $U$는 $AA^T$ (즉, $A^T$의 공분산 행렬) 의 고유벡터들 이며 orthogonal matrix(직교행렬)이다.
- $V$는 $A^TA$ (즉, $A$의 공분산 행렬) 의 고유벡터들 orthogonal matrix(직교행렬)이다.
- $\Sigma \Sigma^T$ 또는 $\Sigma^T \Sigma= \lambda$
따라서, singular value (특이값) $\sigma = \sqrt{\lambda}$
의미 분석

$\mathbf{A}$ 는 linear trasnformd을 하는 행렬이고,
$U, \Sigma, V$로 3개의 linear transform을 하는 행렬로 나눠질 수 있다.
그런데, 기하학적으로 $V^T, U$는 크기는 변하지 않으며 방향 변환을 $\Sigma$는 방향은 변하지 않으며 크기 변환만 수행하는 연산을 의미한다.
또한, 의미적으로 $\mathbf{A}$ 를 $n$개의 feature를 지닌 $m$개의 샘플로 구성된 데이터 행렬이라고 생각했을때,
데이터의 특성(데이터의 분산표현)은 다음과 같다.
- 행공간에 대한 데이터 특성 $\mathbf{A}^T\mathbf{A}$
- 열공간에 대한 데이터 특성 $\mathbf{A}\mathbf{A}^T$
이때, 행공간과 열공간은 $k$개의 직교하는 bases vector로 span하며 그 벡터들은 다음과 같다.
- $m$차원의 행공간의 데이터 특성에 대한 $k$개의 서로 직교하는 기저 표현을 $U$
- $n$차원의 열공간의 데이터 특성에 대한 $k$개의 서로 직교하는 기저 표현을 $V$
또한, 열공간과 행공산 사이에 $k$공간의 연결고리가 있으며, 두 공간의 방향이 일치하는 상황이다.
- $k$차원의 행공간과 열공간 사이의 각 차원 scale 차이가 $\Sigma$의 각 원소를 의미
결론적으로 특이값 분해(SVD)가 말하는 것은 다음과 같다.
직교하는 벡터 집합 $V$ 에 대하여, $\Sigma$ 를 이용한 선형 변환 후에 그 크기는 변하지만 여전히 직교할 수 있게 되는 그 직교 집합은 $U$라는 것이다.
In [21]:
1
2
3
4
5
6
7
| * 원본 data
[[6. 9. 8.]
[1. 0. 0.]
[1. 1. 8.]
[0. 9. 4.]
[6. 3. 5.]]
|
Use Libriary
In [22]:
1
2
3
4
5
6
7
8
9
10
11
12
13
| [18.647 6.666 4.781]
[[-0.718 -0.035 0.26 ]
[-0.02 0.066 0.17 ]
[-0.338 0.539 -0.766]
[-0.455 -0.724 -0.281]
[-0.403 0.424 0.487]]
[[-0.38 0.441 0.813]
[-0.649 -0.753 0.105]
[-0.659 0.488 -0.573]]
[[18.647 0. 0. ]
[ 0. 6.666 0. ]
[ 0. 0. 4.781]]
|
In [23]:
1
2
3
4
5
6
| [[ 6.000e+00 9.000e+00 8.000e+00]
[ 1.000e+00 1.275e-15 1.495e-15]
[ 1.000e+00 1.000e+00 8.000e+00]
[-1.608e-15 9.000e+00 4.000e+00]
[ 6.000e+00 3.000e+00 5.000e+00]]
|
Trucated SVD(즉 dimensionality reduction을 함):
In [24]:
1
2
3
4
5
| array([[ 4.99 , 8.87 , 8.711],
[ 0.339, -0.085, 0.466],
[ 3.978, 1.384, 5.903],
[ 1.094, 9.141, 3.229],
[ 4.105, 2.755, 6.334]])
|
Compute Numerically
recall that …
- Note that $AA^T$ 또는 $A^TA$ 은 symmetric matrix이므로, eigen decomposition이 가능
- $U$는 $AA^T$ 즉, $A^T$의 공분산 행렬의 (
k개의)고유벡터들
- $V$는 $A^TA$ 즉, $A$의 공분산 행렬의 (
k개의)고유벡터들
\[cov(A)= \frac{A^T A}{m−1} \propto A^T A\]
Step 1. Find Covarance of $A$ and $A^T$
In [25]:
1
2
3
4
5
6
7
8
9
| [[ 74. 73. 86.]
[ 73. 172. 131.]
[ 86. 131. 169.]]
[[181. 6. 79. 113. 103.]
[ 6. 1. 1. 0. 6.]
[ 79. 1. 66. 41. 49.]
[113. 0. 41. 97. 47.]
[103. 6. 49. 47. 70.]]
|
Step 2. Find Eigen Values and Eigen Vectors of $Cov(A)$ or $Cov(A^T)$
$Cov(A)$ 의 고유벡터들을 구하면 $V$가 된다.
In [43]:
1
2
3
4
5
6
7
| eigenvalues =
[18.647 6.666 4.781]
eigenvectors, which is same with V =
[[-0.38 0.441 -0.813]
[-0.649 -0.753 -0.105]
[-0.659 0.488 0.573]]
|
In [27]:
1
2
3
4
| 2.220446049250313e-16
5.551115123125783e-17
9.43689570931383e-16
|
Step 3 Find $U, \Sigma$
$A = U\sum V^T$ 에서 양쪽 수식의 오른쪽에 $V$ 를 곱하면,
$AV = U\sum = [s_1 U_1, s_2 U_2, … ,s_r U_r] $ 인데
각 column마다 대응되는 singular value $s_i\vert_{i=1,2, …, r}$를 나누어주면
$U$ 를 구할 수 있다.
이때, singular value들은 V를 구할때 찾은 eigen values들이 된다.
In [28]:
1
2
3
4
5
6
7
| [18.647 6.666 4.781]
[[-0.718 -0.035 -0.26 ]
[-0.02 0.066 -0.17 ]
[-0.338 0.539 0.766]
[-0.455 -0.724 0.281]
[-0.403 0.424 -0.487]]
|
In [29]:
1
2
3
| array([[18.647, 0. , 0. ],
[ 0. , 6.666, 0. ],
[ 0. , 0. , 4.781]])
|
In [30]:
1
2
3
4
5
| array([[6., 9., 8.],
[1., 0., 0.],
[1., 1., 8.],
[0., 9., 4.],
[6., 3., 5.]])
|
Sanity Check:Reconstruct $A$ by multiplication of $U, S, V^T$
In [31]:
1
2
3
4
5
| array([[ 6.000e+00, 9.000e+00, 8.000e+00],
[ 1.000e+00, 5.963e-16, -3.135e-16],
[ 1.000e+00, 1.000e+00, 8.000e+00],
[ 4.682e-15, 9.000e+00, 4.000e+00],
[ 6.000e+00, 3.000e+00, 5.000e+00]])
|
일반적으로, 어떤 rating matrix $\mathbf{A}$을 가지고, 추정한 SVD값과의 RMSE는 최소가 됨이 증명 되어있다.
하지만, $\mathbf{A}$에 missing value 가 있을 때에는 SVD를 구할수 없어 prediction 된 $U$, $\Sigma$, $V$를 찾아야한다.
따라서, 이 predication된 SVD 는 latent factor 모델을 이용한 추천시스템에 사용된다.
추천시스템 활용 예제는 프로도의 머릿속 블로그 에 잘 정리되어 있어 링크를 남긴다.
추천시스템 활용 예제
In [45]:
|
Starwars |
Avata |
Alien |
Casablanca |
Titanic |
| u1 |
1.0 |
1.0 |
1.0 |
0.0 |
0.0 |
| u2 |
3.0 |
3.0 |
3.0 |
0.0 |
0.0 |
| u3 |
4.0 |
4.0 |
4.0 |
0.0 |
0.0 |
| u4 |
5.0 |
5.0 |
5.0 |
0.0 |
0.0 |
| u5 |
0.0 |
0.0 |
0.0 |
4.0 |
4.0 |
| u6 |
0.0 |
0.0 |
0.0 |
5.0 |
5.0 |
| u7 |
0.0 |
0.0 |
0.0 |
2.0 |
2.0 |
In [49]:
1
2
3
4
5
6
7
8
9
10
11
12
| [[12.369 0. ]
[ 0. 9.487]]
[[-0.14 0. ]
[-0.42 0. ]
[-0.56 0. ]
[-0.7 0. ]
[ 0. -0.596]
[ 0. -0.745]
[ 0. -0.298]]
[[-0.577 -0.577 -0.577 -0. -0. ]
[-0. -0. -0. -0.707 -0.707]]
|
In [50]:
|
u1 |
u2 |
u3 |
u4 |
u5 |
u6 |
u7 |
| u1 |
1.0 |
1.0 |
1.0 |
1.0 |
-1.0 |
-1.0 |
-1.0 |
| u2 |
1.0 |
1.0 |
1.0 |
1.0 |
-1.0 |
-1.0 |
-1.0 |
| u3 |
1.0 |
1.0 |
1.0 |
1.0 |
-1.0 |
-1.0 |
-1.0 |
| u4 |
1.0 |
1.0 |
1.0 |
1.0 |
-1.0 |
-1.0 |
-1.0 |
| u5 |
-1.0 |
-1.0 |
-1.0 |
-1.0 |
1.0 |
1.0 |
1.0 |
| u6 |
-1.0 |
-1.0 |
-1.0 |
-1.0 |
1.0 |
1.0 |
1.0 |
| u7 |
-1.0 |
-1.0 |
-1.0 |
-1.0 |
1.0 |
1.0 |
1.0 |
In [51]:
|
Starwars |
Avata |
Alien |
Casablanca |
Titanic |
| Starwars |
1.000000 |
1.000000 |
1.000000 |
-0.748783 |
-0.748783 |
| Avata |
1.000000 |
1.000000 |
1.000000 |
-0.748783 |
-0.748783 |
| Alien |
1.000000 |
1.000000 |
1.000000 |
-0.748783 |
-0.748783 |
| Casablanca |
-0.748783 |
-0.748783 |
-0.748783 |
1.000000 |
1.000000 |
| Titanic |
-0.748783 |
-0.748783 |
-0.748783 |
1.000000 |
1.000000 |
Find the representation of a new user in concept space(잠재 공간)
new user u = [0, 3, 0, 0, 4]
In [52]:
What does the representation predict about how well the new user would
like the other movies appearing in our example data?
We map the concept space back with $V^T$ to predict the movie rating by the new user u:
In [53]:
1
| array([1., 1., 1., 2., 2.])
|
사실 SVD 방식은 Full matrice 에서 사용하는 방법이다.
missing value 가 많아 Sparse 한 평점 행렬을 기반으로 하는 추천시스템에서
사용하려면 missing value 에 대한 전처리 과정이 필요하다.
missing value 를 다루는 방법은 여러가지가 있다.
stack exchnage 참조
논문[5] 참고
가장 simple한 방법은 다음과 같다.
- missing value 를 그 유저의 평균 평점으로 채워넣는다.
- eigenvalue가 적절히 높은 $k$(reducted dimension)를 선택하여 SVD를 수행한다.
- $U, \Sigma, V$를 사용하여 평점 행렬을 예측한다.
- 성능을 평가한다. (이 부분 생략)
In [44]:
|
Superman |
Batman |
Ironman |
Amelie |
| u1 |
1.0 |
2.0 |
8.0 |
10.0 |
| u2 |
10.0 |
NaN |
8.0 |
3.0 |
| u3 |
8.0 |
9.0 |
9.0 |
2.0 |
| u4 |
4.0 |
5.0 |
9.0 |
7.0 |
u2의 Batman에 대한 평점을 예측한다고 가정하면 다음과 같이 진행된다.
In [60]:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| [[ 1. 2. 8. 10.]
[10. 7. 8. 3.]
[ 8. 9. 9. 2.]
[ 4. 5. 9. 7.]]
[[26.141 0. 0. ]
[ 0. 10.165 0. ]
[ 0. 0. 2.303]]
[[-0.4 0.761 0.124]
[-0.545 -0.397 0.738]
[-0.554 -0.419 -0.627]
[-0.486 0.297 -0.214]]
[[-0.468 -0.46 -0.647 -0.388]
[-0.529 -0.348 0.178 0.753]
[ 0.708 -0.565 -0.293 0.305]]
|
In [61]:
1
2
3
4
| array([[ 1. , 1.952, 8.056, 9.964],
[10. , 7.001, 7.998, 3.001],
[ 8. , 8.966, 9.04 , 1.975],
[ 4. , 5.077, 8.911, 7.057]])
|
u2의 Batman에 대한 평점이 7.001로 예측 되었다.
Reference
[1] korean blog - summary
[2] Eigendecomposition of a Matrix - wiki
[3] korean blog - Symmetric Matrix and Spectrum Theory
[4] SVD - wiki
[5] Applying SVD on Item-based Filtering - paper, IEEE 2005
[6] Matrix Factorization 정리
[7] 공돌이의 수학정리노트
Appendix
eigen values, eigen vectors들은 power iteration 을 반복하여 찾는 것이 가능하다.
- power iteration 방법을 사용
\(v_{t} = \frac{M v_{t-1}} { \lVert Mv_{t-1} \rVert }\)
power iteration을 통해 첫번째로 수렴하는 v값이 가장 큰 eigen value와 대응되는 eigen vector이다.
이때, largest eigen value는
\(v^T M v\) 이다.
Gram schmidt process에 따라 $M$ 에서 largest igen vector 성분을 다음과 같이 제거하고,
\(M_{new} = M - \lambda v v^T\)
power iteration을 반복하면 두번째로 큰 eigen value와 대응하는 eigen vector를 찾을 수 있다.
Theory: Gram schmidt process - wiki
Korean blog: eigen values, vectors - darkprogrammer
Another korean blog: eigen values, vectors
In [38]:
1
2
3
4
5
6
7
8
| [[1. 1. 1.]
[1. 2. 3.]
[1. 3. 5.]]
[ 7.162e+00 8.377e-01 -2.958e-16]
[[-0.218 -0.886 0.408]
[-0.522 -0.248 -0.816]
[-0.825 0.391 0.408]]
|
- power iteration in order to find eigen vector corresponding to the largest eigen value.
\(v_{t} = \frac{M v_{t-1}} { \lVert Mv_{t-1} \rVert }\)
In [39]:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
| iteration 0 ...
distance = 0.890429726059787
iteration 1 ...
distance = 0.04894577225762312
iteration 2 ...
distance = 0.005731964656124627
iteration 3 ...
distance = 0.0006704398749804303
iteration 4 ...
distance = 7.84167576513936e-05
iteration 5 ...
distance = 9.171868646813307e-06
iteration 6 ...
distance = 1.0727703710604327e-06
iteration 7 ...
distance = 1.2547456944453433e-07
iteration 8 ...
distance = 1.4675897110185787e-08
iteration 9 ...
distance = 1.716538713429754e-09
[[0.218]
[0.522]
[0.825]]
|
- Find largest eigen value by solving $Mv = \lambda v = v \lambda $
\(\lambda = v^T M v\)
In [40]:
- eliminate principal eigen vector
\(M_{new} = M - \lambda v v^T\)
In [41]:
1
2
3
4
| [[ 0.658 0.184 -0.291]
[ 0.184 0.051 -0.081]
[-0.291 -0.081 0.128]]
|
- Find second largest eigen value
power iteration again
then, we can get eigen vector corresponding to 2nd largeset eigen value
In [42]:
1
2
3
4
5
6
| iteration 0 ...
iteration 1 ...
[[ 0.886]
[ 0.248]
[-0.391]]
|
Futhermore
- MDS(multi-dimensional scaling)
- t-SNE(t-stochastic neighbor embeeding)


Leave a comment