In [1]:
Least Squares
SSE(Sum of the Squared Error)을 최소화 하는 방법으로 해를 구한다.
Machine Learning 분야에서 주어진 데이터에 대해 목표하는 데이터를 예측 하기 위한 모델을 디자인할때 그 모델의 파라미터를 학습하는데 쓰인다.
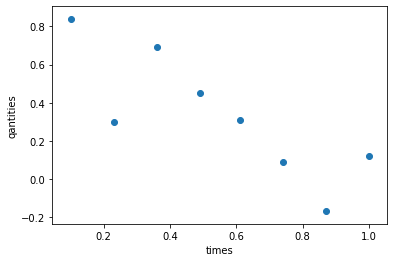
In [2]:
|
times |
quantities |
| 0 |
0.10 |
0.84 |
| 1 |
0.23 |
0.30 |
| 2 |
0.36 |
0.69 |
| 3 |
0.49 |
0.45 |
| 4 |
0.61 |
0.31 |
| 5 |
0.74 |
0.09 |
| 6 |
0.87 |
-0.17 |
| 7 |
1.00 |
0.12 |
In [3]:
Linear Least Squares
모델을 선형함수로 디자인 한 경우를 말한다.
선형식으로 구성된 모델이므로 $Ax = b$의 관계를 가진다.
이를 이용하여 SSE를 최소화하는 모델의 파라미터를 직접적으로 바로 구할 수 있다.
Proof
주어진 값들을 이용하여 만든 matrix $\mathbf{X} \in \mathbb{R}^{m \times n}$,
찾고자하는 모델 파라미터 변수들을 $\mathbf{\boldsymbol{\beta}} \in \mathbb{R}^{n}$,
타겟 변수들을 $\mathbf{y} \in \mathbb{R}^{m}$
이라 두고, SSE 값 $S(\mathbf{\boldsymbol{\beta}})$ 는 다음과 같이 계산된다.
\(\begin{align}
S(\mathbf{\boldsymbol{\beta}}) &= \lVert \mathbf{y} - \mathbf{X} \mathbf{\boldsymbol{\beta}} \rVert^2 \\
&= (\mathbf{y} - \mathbf{X} \mathbf{\boldsymbol{\beta}})^\mathbf{T}(\mathbf{y} - \mathbf{X} \mathbf{\boldsymbol{\beta}}) \\
&= \mathbf{y}^{\mathbf{T}}\mathbf{y} - \mathbf{\boldsymbol{\beta}}^{\mathbf{T}} \mathbf{X}^{\mathbf{T}} \mathbf{y} - \mathbf{y}^{\mathbf{T}} \mathbf{X} \mathbf{\boldsymbol{\beta}} + \mathbf{\boldsymbol{\beta}}^{\mathbf{T}} \mathbf{X}^{\mathbf{T}} \mathbf{X} \mathbf{\boldsymbol{\beta}} \\
& (\mathbf{\boldsymbol{\beta}}^{\mathbf{T}} \mathbf{X}^{\mathbf{T}} \mathbf{y} = \mathbf{y}^{\mathbf{T}} \mathbf{X} \mathbf{\boldsymbol{\beta}} \because \text{it is scalar}) \\
&= \mathbf{y}^{\mathbf{T}} \mathbf{y} - 2 \mathbf{\boldsymbol{\beta}}^{\mathbf{T}} \mathbf{X}^{\mathbf{T}} \mathbf{y} + \mathbf{\boldsymbol{\beta}}^{\mathbf{T}} \mathbf{X}^{\mathbf{T}} \mathbf{X} \mathbf{\boldsymbol{\beta}} \\
\end{align}\)
$S(\boldsymbol{\beta})$ 를 최소화하는 $\boldsymbol{\beta}$를 찾으면 된다.
이 방식을 쓸때, $S(\boldsymbol{\beta})$ 가 최솟값을 가지기 위해서 $\mathbf{X}^{\mathbf{T}} \mathbf{X}$ 는 positive definite이어야 한다.
positive definite일때 다음과 같은 특징을 가진다.
- $\mathbf{X}^{\mathbf{T}} \mathbf{X}$의 모든 eigen value 값들이 양의 실수
- $\mathbf{X}$의 rank는 $n$(full column rank)
why?
[5]를 참고하면 자세히 알수 있다.
한마디로 말하면 우리의 목표 함수인 SSE가 극소값을 가질 조건을 의미.
추가적인 성질로 symmetrix matrix 관련하여 다음과 같은 특성들이 있다.
($\mathbf{X}^{\mathbf{T}} \mathbf{X}$ 는 symmetric matrix임.)
- 모든 element가 실수인 symmetic 인 matrix $\Rightarrow$ positive definite
- eigen decomposition했을때 diagonalizable 함.($n$ 개의 서로 orthogonal한 eigen vector를 갖는다.)
따라서, 정리하면 다음과 같이 전개된다.
\(\begin{align}
\frac{\partial S(\boldsymbol{\beta})}{\partial \boldsymbol{\beta}} &= 0 \\
-2 \mathbf{X}^{\mathbf{T}} \mathbf{y} + 2 \mathbf{X}^{\mathbf{T}} \mathbf{X} \boldsymbol{\beta} &= 0 \\
\mathbf{X}^{\mathbf{T}} \mathbf{X} \boldsymbol{\beta} & = \mathbf{X}^{\mathbf{T}} \mathbf{y} \\
\boldsymbol{\beta} & = (\mathbf{X}^{\mathbf{T}} \mathbf{X})^{-1}\mathbf{X}^{\mathbf{T}} \mathbf{y} \\
\end{align}\)
다시 문제로 되돌아가자.
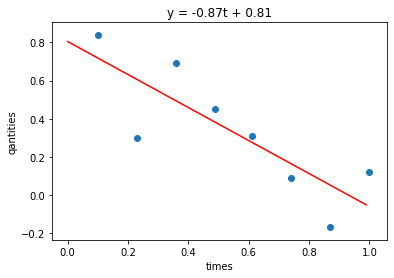
아래 식과 같이 linear 모델을 가정하고, $\beta_1, \beta_2$ 를 찾으면 된다.
\[\begin{align}
q(t) &= \beta_1 t + \beta_2 \\
&=
\begin{bmatrix}
t & 1
\end{bmatrix}
\begin{bmatrix}
\beta_1 \\
\beta_2 \\
\end{bmatrix} \\
\mathbf{y} &= \mathbf{X} \boldsymbol{\beta}
\end{align}\]
In [4]:
1
2
3
4
5
6
7
8
9
| [[0.1 1. ]
[0.23 1. ]
[0.36 1. ]
[0.49 1. ]
[0.61 1. ]
[0.74 1. ]
[0.87 1. ]
[1. 1. ]]
|
1
2
| array([[3.1092, 4.4 ],
[4.4 , 8. ]])
|
In [5]:
1
2
3
| estimated beta=[-0.86593151 0.80501233]
minimized SSE=0.24029957196749854
|
Visualization
In [6]:
Non-Linear Least Squares
모델을 비선형 함수로 디자인 한 경우
$f(x) = b$ 관계를 갖는다.
Newton-Gauss method를 사용하면 모델 파라미터에 대한 선형화된 Recurrence를 찾을 수 있다.
이 Recurrence에 linear least square방식을 이용하여 모델의 파라미터를 업데이트 함으로써 수치해석적으로 오차를 최소화하는 모델 파라미터 값들을 찾는다.
비선형 함수 $f(\boldsymbol{\beta} \vert \mathbf{x})$는 주어진 데이터 $\mathbf{x}$를 이용하여 타겟 변수 $y$를 예측하는 함수이다.
이 예측에 대한 SSE $S(\mathbf{\boldsymbol{\beta}})$는 다음과 같으며 이를 최소화하는 모델 파라미터를 찾을 것이다.
\[\begin{align}
S(\boldsymbol{\beta}) &= \lVert f(\boldsymbol{\beta} \vert \mathbf{x}) - \mathbf{y}\rVert^2 \\
&= \sum_{i=1}^{m}{(f(\boldsymbol{\beta} \vert x_i) - y_i)^2}
\end{align}\]
이 objective 함수를 최소화하는 $\boldsymbol{\beta}$ 를 찾을 것이다.
따라서, 아래의 연립 방정식을 풀면 된다.
\[\begin{cases}
f(\boldsymbol{\beta} \vert x_1) - y_1 = 0 \\
f(\boldsymbol{\beta} \vert x_2) - y_2 = 0 \\
... \\
f(\boldsymbol{\beta} \vert x_m) - y_m = 0 \\
\end{cases}\]
위와같이 $n$개의 $\boldsymbol{\beta} = [\beta_1, \beta_2, …, \beta_n]$ 에 대해 $m$개의 비선형 연립 방정식에 대한 해를 구하는 문제가 있을때, 이를 수치해석적으로 구하는 Gauss-Newton 방법이 있다. 관련 블로그 글
$f(\boldsymbol{\beta} \vert \mathbf{x}) - \mathbf{y} = 0$의 근사 해 $\boldsymbol{\beta}$를 구하자.
( Newton-Rapshon method으로 생각하면 현재 위치에서 접선과 \beta 축이 만나는 지점으로 업데이트 해나가는 방식이다.Tayler급수로도 생각가능, 편의상 $f(\boldsymbol{\beta} \vert \mathbf{x})$ 를 $f(\boldsymbol{\beta}$) 로 표기)
\[\begin{align}
\mathbf{y} = J_{f(\boldsymbol{\beta_k})} (\boldsymbol{\beta_{k + 1}} - \boldsymbol{\beta_{k}}) + f(\boldsymbol{\beta_k})\\
J_{f(\boldsymbol{\beta_k})} (\boldsymbol{\beta_{k + 1}} - \boldsymbol{\beta_{k}}) = \mathbf{y} - f(\boldsymbol{\beta_k})
\end{align}\]
위의 결과를 보면 $Ax=b$ 꼴의 선형적인 관계로 생각할 수 있다.
($J_{f(\boldsymbol{\beta_k})} \in \mathbb{R}^{m \times n}, f(\boldsymbol{\beta_k}) \in \mathbb{R}^{m}, \boldsymbol{\beta_k} \in \mathbb{R}^{n}$, $k$는 iteration index)
따라서, linear least square 방법을 이용하여 $\boldsymbol{\beta}$ 에 대한 Recurrence는 다음과 같이 유도된다.
\[\begin{align}
J_{f(\boldsymbol{\beta_k})}^{\mathbf{T}} J_{f(\boldsymbol{\beta_k})}
(\boldsymbol{\beta_{k + 1}} - \boldsymbol{\beta_{k}}) &= J_{f(\boldsymbol{\beta_k})}^{\mathbf{T}}(\mathbf{y} - f(\boldsymbol{\beta_k})) \\
\boldsymbol{\beta_{k + 1}} - \boldsymbol{\beta_{k}} &=
(J_{f(\boldsymbol{\beta_k})}^{\mathbf{T}} J_{f(\boldsymbol{\beta_k})})^{-1}
J_{f(\boldsymbol{\beta_k})}^{\mathbf{T}}(\mathbf{y} - f(\boldsymbol{\beta_k})) \\
\end{align}\]
여기서 $J_{f(\boldsymbol{\beta_k})}$ 는 다음과 같은 matrix 이다.
\(\begin{bmatrix}
\frac{\partial f(\boldsymbol{\beta} \vert x_1)}{\partial{\beta_1}} &
\frac{\partial f(\boldsymbol{\beta} \vert x_1)}{\partial{\beta_2}} & ... &
\frac{\partial f(\boldsymbol{\beta} \vert x_1)}{\partial{\beta_n}} \\
\frac{\partial f(\boldsymbol{\beta} \vert x_2)}{\partial{\beta_1}} &
\frac{\partial f(\boldsymbol{\beta} \vert x_2)}{\partial{\beta_2}} & ... &
\frac{\partial f(\boldsymbol{\beta} \vert x_2)}{\partial{\beta_n}} \\
... & ... & ... & ... \\
\frac{\partial f(\boldsymbol{\beta} \vert x_m)}{\partial{\beta_1}} &
\frac{\partial f(\boldsymbol{\beta} \vert x_m)}{\partial{\beta_2}} & ... &
\frac{\partial f(\boldsymbol{\beta} \vert x_m)}{\partial{\beta_n}} \\
\end{bmatrix}\)
$(J_{f(\boldsymbol{\beta_k})}^{\mathbf{T}} J_{f(\boldsymbol{\beta_k})})^{-1}J_{f(\boldsymbol{\beta_k})}^{\mathbf{T}}(\mathbf{y} - f(\boldsymbol{\beta_k}))$ 가 수렴할 때까지 Recurrence 수행한다.
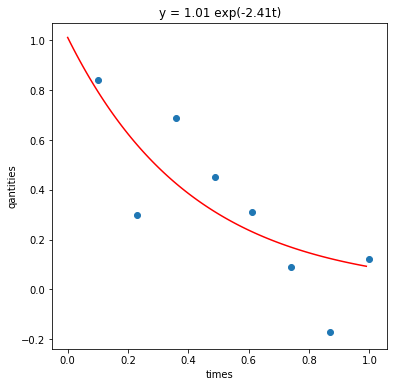
문제로 되돌아가서, 다음과 같은 비선형 모델을 정의하자.
\[\begin{align}
q(t) &= \beta_2 e^{\beta_1 t} \\
\mathbf{y} &= f(\boldsymbol{\beta} \vert \mathbf{x})
\end{align}\]
In [7]:
In [8]:
1
2
| array([2.32366849, 2.82397984, 3.43201372, 4.17096399, 4.9935505 ,
6.06871679, 7.37537819, 8.96337814])
|
Implementation of Gradient and Jacobian Numerically
In [9]:
In [10]:
1
2
3
4
5
6
7
8
| array([[0.23236685, 1.16183424],
[0.64951536, 1.41198992],
[1.23552494, 1.71600686],
[2.04377235, 2.08548199],
[3.0460658 , 2.49677525],
[4.49085042, 3.0343584 ],
[6.41657903, 3.68768909],
[8.96337815, 4.48168906]])
|
First Iteration Line by Line
In [11]:
1
2
| array([[157.14028051, 92.63511433],
[ 92.63511433, 59.76329427]])
|
In [12]:
1
2
3
4
| array([[-0.11573418, -0.11356496, -0.10509634, -0.08771619, -0.06080097,
-0.01568001, 0.05168969, 0.14879718],
[ 0.19883246, 0.19965588, 0.19161624, 0.17085875, 0.13602128,
0.07507748, -0.01841585, -0.15564996]])
|
In [13]:
1
2
| array([-1.48366849, -2.52397984, -2.74201372, -3.72096399, -4.6835505 ,
-5.97871679, -7.54537819, -8.84337814])
|
In [14]:
1
| array([-0.25446605, -1.53060605])
|
In [15]:
1
| array([1.24553395, 0.46939395])
|
Overall Iteration
In [16]:
In [17]:
1
2
3
| [0.1 0.23 0.36 0.49 0.61 0.74 0.87 1. ]
[ 0.84 0.3 0.69 0.45 0.31 0.09 -0.17 0.12]
|
In [18]:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| beta=[1.24553395 0.46939395] update=1.7850720976449588
beta=[0.02047755 0.52811626] update=1.283778713511213
beta=[-1.61271204 0.80096624] update=1.9060395771269723
beta=[-2.46726249 1.01216871] update=1.0657529124230951
beta=[-2.4021815 1.00898294] update=0.0682667564238679
beta=[-2.41576988 1.01216461] update=0.016770051170741707
beta=[-2.41322039 1.01153913] update=0.003174974435458694
beta=[-2.41370391 1.01165805] update=0.0006024458740083727
beta=[-2.41361238 1.01163555] update=0.00011402799420298648
beta=[-2.41362971 1.01163981] update=2.1587509853843168e-05
beta=[-2.41362644 1.011639 ] update=4.079957196284623e-06
beta=[-2.41362705 1.01163916] update=7.649656799668669e-07
beta=[-2.41362694 1.01163913] update=1.3763927009247112e-07
estimated beta=[-2.41362696 1.01163913]
minimized SSE=6.7511665453525165
|
Visualization
In [19]:
Reference
[1] Least Squares - wiki
[2] Proofs involving ordinary least squares - wiki
[3] Linear Algebra Korean tutorial
[4] Linear/Non-Linear Least Squares Slide English tutorial
[5] Positive Definite Meaning Korean
[6] Non-Linear Least Squares - wiki


Leave a comment